
摘要:论述了视频检测在智能交通领域的应用,分析了目前交通信号机系统存在的不足。提出了以TMS320F2812为核心的视频图像运动目标检测方案,并进行了方案的同步信号分离电路、系统总体结构设计,以及信号采样和数据处理的软件设计。实验表明该解决方案设计达到了预期目标,具有较高的准确性。
关键词:交通控制;视频检测;运动目标检测;DSP;TMS320F2812
视频图像检测与处理技术在智能交通(ITS)领域中的应用研究已引起了国内外学者广泛关注,已形成许多研究热点。目前交通领域视频检测技术主要用于车速、车型、车流量检测,车牌检测,智能泊车系统、安全监控等方面,有成熟的视频检测产品。但在路口交通方案解决、提高路口交通效率方面应用较少。
目前城市交通路口应用较多的是感应线圈检测方式,但其安装、维修不便,对道路有破坏,成本高昂。其他可应用的检测方式,诸如超声波检测准确性不高,易受干扰;微波检测产品的成本较高。
本文设计了基于TMS320F2812的路口车辆状态视频检测系统,实时检测路口车辆状态,并将结果反馈回路口信号控制机,便于信号机优化路口信号灯的运行方案。
1 基于视频检测的解决方案
1.1 方案的提出
目前大多数城市所使用的交通控制机系统,路口的红绿灯运行方案基本是固定的。这样就会出现一种情况,即在某时刻某方向无车,该方向依然是绿灯。若无车的情况可以及时检测并反馈到控制机,则可以提高交通效率,对此提出了基于TMS320F2812的交通路口车辆状态视频检测系统。
1.2 系统工作原理
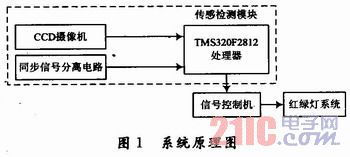
系统工作原理图如图1所示,图中监控摄像机安装于路口斑马线之前约70 m处(视路口车流量而定,繁忙路口则远;反之则近),视频信号由DSP本身自带的A/D模块进行采样和处理,依据处理结果输出一个高低电平信号,此信号由路口的控制机在对应路口通行方向为绿灯时进行查询并记录。记录一段时间(数周或数月)之后,便可以依据记录结果统计优化信号灯运行方案。由于图像检测的数据处理量较大,实时性要求高,因此系统设计的处理核心采用TMS320F2812DSP数字信号处理器。
2 系统硬件设计
2.1 复合视频信号
CCD摄像机输出完整的视频信号是1 Vp-p的复合模拟信号,包括图像信号、同步信号、消隐信号、槽脉冲和均衡脉冲信号。一场图像时间为20 ms,其中各脉冲宽度如下:行同步4.7 μs;场同步160μs;均衡脉冲2.35μs.槽脉冲4.7 μs;场消隐脉冲1 612μs;行消隐12μs。因此,需要将场消隐信号分离出来作为每一场图像采集的触发信号。
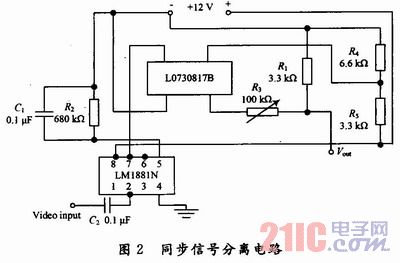
2.2 场同步信号分离电路
LM1881N是一款视频同步信号分离芯片,主要用于NTSC,PAL,SECAM制式,幅度为0.5~2 Vp-p之间的视频同步信号分离。LM1881N应用电路图如图2所示。
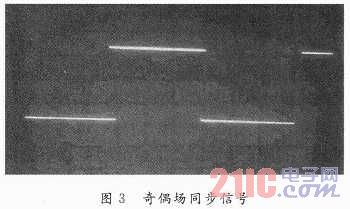
用示波器观察信号Vout的波形图,如图3所示。
2.3 图像处理系统
系统设计图像处理核心为TMS320F2812DSP处理器。实验中将奇偶场同步信号Vout(图3中的方波信号)接入TMS320F2812的I/O口,使用查询中断的方式触发A/D采样。连接原理图如图4所示。

如图3和图4所示,TMS320F2812在程序初始化后即查询I/O口引脚信号,在同步信号的上升沿A/D模块开始采样CCD摄像机接入的图像信号。对应每场图像采样时间不超过18.4 ms。
3 系统软件设计
3.1 信号采集方案特点
根据系统的目的要求,系统只需实时检测路面是否有车辆经过即可,而无需检测车速、加速度、车流量等。即不需要采集全副图像数据进行处理,只需采集足够多的像素点进行处理就可以判断是否有运动目标的存在。这样就可以大大降低数据处理量和节约时间,提高系统检测速度。
3.2 运动目标检测算法
基于视频图像的运动目标检测方法有多种分类,目前常用的主要有帧差法、背景减法和基于光流的方法。本文采用背景减法和帧差法相结合的处理方法。
检测方法的步骤:
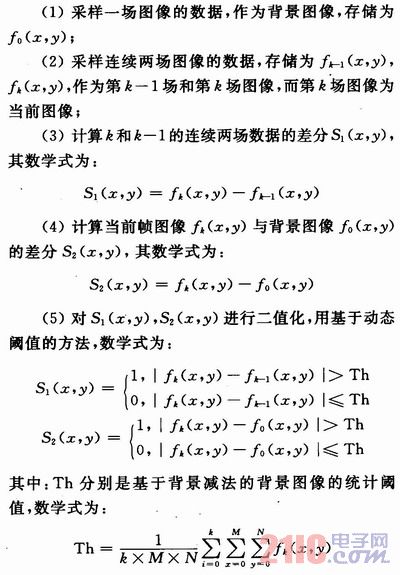
式中:M×N表示采集图像大小,数值表示检测区像素数;k表示的是连续采集的图像场数,为得到较好的背景图像阈值,k值需足够大;如果M,N,k值足够大,即M×N×k的值够大,则求得的统计阈值Th越合适。
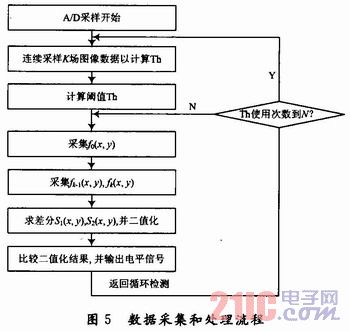
(6)对S1(x,y),S2(x,y)进行统计和比较,求差值,若差值超过一定值,则表示有运动目标存在;反之,无运动目标。数据采集和处理流程如图5所示。
4 实验和分析
在实验室条件下进行实验,参数k取200,M×N取570采样值,即M×N×k值取为114 000;每个Th更新周期N取300;背景为固定背景,运动目标为行人,光线充足且无直射和闪烁。实验结果记录如表1所示,S1,S2分别表示S1(x,y),S2(x,y)。
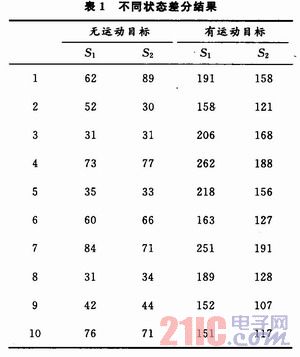
表1进行多次实验,统计实验结果表明,在无运动目标状态下,S1(x,y),S2(x,y)值最大不超过100,且有95.3%分布在90以内;在有运动目标状态下,S1(x,y),S2(x,y)值一般超过120,且有96.6%超过110。因此,可以将100和110作为判断是否存在运动目标的门槛值。
同时,实验运动目标的大小、速度,M×N取值大小都会影响检测结果。运动目标越大,M×N取值越大则检测结果越好,但是数据处理量增加会使单次检测时间增加。
5 结语
本解决方案达到了预期目标,实现了对交通路口车辆状态的判断功能,运用于交通控制机可以有效地提高路口通行效率。方案在应用中对现有道路无破坏性,安装方便,成本较低。此外,提高系统的数据处理能力和可靠性,使用更好的图像处理方法来提高检测的准确性和灵敏度也是研究的重点之一。