
旋转变压器" title="旋转变压器">旋转变压器(resover)包含三个绕组,即一个转子绕组和两个定子绕组" title="定子绕组">定子绕组。转子绕组随马达旋转,定子绕组位置固定且两个定子互为90度角(如图1所示)。这样,绕组形成了一个具有角度依赖系数的变压器。
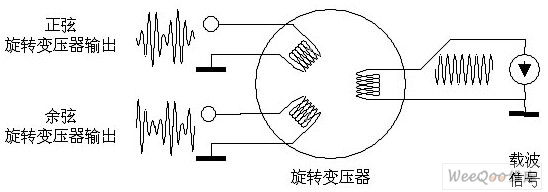
图1:旋转变压器及其相关信号
将施加在转子绕组上的正弦载波耦合至定子绕组,对定子绕组输出进行与转子绕组角度相关的幅度调制。由于安装位置的原因,两个定子绕组的调制输出信号的相位差为90度。
通过解调两个信号可以获得马达的角度位置信息,首先要接收纯正弦波及余弦波,然后将其相除得到该角度的正切值,最终通过“反正切”函数求出角度值。由于一般情况下要使用DSP进行算术处理,因而需要将正弦及余弦波数字化。目前市面上有几种具备这些功能的专用产品,然而其价格昂贵,对于大多数应用而言需要寻求其他替代方案。
目前有一种最为常用的方法是,检测输出信号中载波频率的峰值来触发模数转换器(ADC)。如果总是在这一时间点转换调制信号,则将消除载波频率。由于更高分辨率的增量累加(Δ-∑)ADC总是在一段时间内对信号进行积分采样,因此它将不仅仅转换峰值电压,因而需要采用诸如TI ADS7861或ADS8361等逐次逼近ADC,分辨率也被限制在12~14位。
这种方法还需要使用几种电路模块,必须生成合适的正弦载波,必须在合适的时间点触发转换过程,且ADC必须对信号进行同步转换。这样不仅增加了成本,且分辨率有限。
新概念的理论依据
新概念使用过采样方法,并将解调移至数字域内,调制信号的过采样采用双通道Δ-∑调制器ADS1205,数字滤波器" title="数字滤波器">数字滤波器芯片AMC1210用于调制器输出的解调和抽取(decimation)。
调制器仅产生位流,这不同于ADC中的数字概念。为了输出相当于模拟输入电压的数字信号,必须使用数字滤波器来处理位流。正弦滤波器是一种非常简单、易于构建且硬件需求最少的一种滤波器。
那些频率为调制器时钟频率除以过采样率" title="过采样率">过采样率所得值的整数倍的信号将被抑制,这些被抑制的频率点称为陷波(notch)。在此新概念中,积分器的抽取率设定的原则是使载波频率落入到某一陷波频率。但首先需要对信号进行解调,否则角度信息将与载波频率一起被忽略。该任务由AMC1210完成。
AMC1210具有四个通道,每个通道均提供如图2所示的滤波器结构。
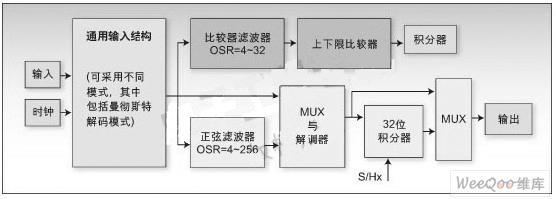
图2:AMC1210的数字滤波器结构
AMC1210也可用于测量电流。在本例中,我们将比较器滤波器(comparator filter)用于过电流保护,能够在低分辨率情况下实现快速响应(如图中蓝色部分所示)。$部分在较低采样率情况下能够产生更高分辨率的输出,这部分用于控制环路。根据应用的需要,在这里可以使用正弦滤波器及积分器来优化滤波器的结构。此外,该通路还可用于滤波及解调。
首先,AMC1210中的正弦滤波器对调制器的位流进行滤波,以将其转换为中等分辨率、中等速率的数据字。对ADS1205而言,最高效的三阶正弦滤波器的过采样率(OSR)为128。过采样率超过128时,OSR每增加一倍,信噪比仅增加3dB。在解调过程后利用积分器可以达到同样的效果,而且还能缩短滤波器的延迟时间。
将OSR设为128时会产生一个14位的数字调制信号,其数据速率为:
该等式中,fmod表示调制器的时钟频率,该时钟频率在调制器中降为原来的一半。在下例中,当时钟信号频率为32.768MHz时,三阶正弦滤波器的数据速率为128kHz。
现在需要对信号进行解调(如图3所示)。
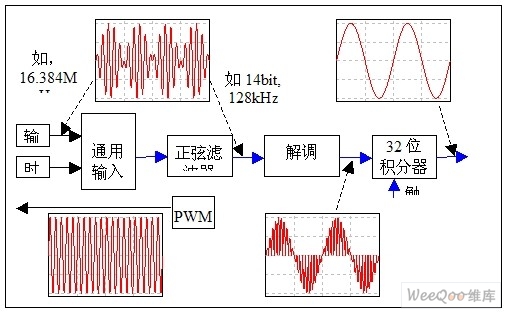
图3:AMC1210内部的解调过程示例
这表示当未调制载波为正时,14位数字信号须乘以+1,若未调制载波为负则须乘以-1。我们需要考虑到载波信号通过旋转变压器、线圈、调制器以及正弦滤波器时产生的延时。因此,AMC1210具有相移校验功能,能够在相移90度内正常工作。若相移超过此范围,则必须在寄存器中编程。
最后,积分器OSR的设定原则是:载波频率是整个滤波器传输函数陷波的整数倍。在时域中,这等同于在多个载波周期内求积分。这样就完全抑制了载波频率。在此例中,如果积分器的OSR为16,则分辨率提高2位(0.5位/因数2)。然而输出信号的幅度降低了3dB(-0.5位),原因是积分器产生的是解调信号的平均电压而非峰值电压。
总结:AMC1210的输出为数字正弦波或余弦波,数据速率为8kHz,噪声性能为15.5位。该信号的幅度比输入调制信号降低了3dB。
角度检测与控制环路同步
角度检测与马达控制环路的同步非常重要,因此,数字滤波器的输出数据速率与载波频率都必须可调。
通过AMC1210内置的寄存器映射可以设定滤波器结构,正弦滤波器的阶数(1阶、2阶及3阶)及过采样率(1~256)都是可编程设定的。积分器可以运行在固定的过采样率上,也可以由外部采样及保持信号触发。
载波频率也是以PWM格式的AMC1210产生。因此,提供了高达1,024位的移位寄存器,一个周期的载波正弦波可以存储在该寄存器中,寄存器的PWM位流可由仿真Δ-∑调制器的小型C语言程序产生。该调制器的输入为要求的载波信号;输出端的位流为PWM信号,这个位流必须储存在移位寄存器中。
AMC1210将提取寄存器中的可编程数据位并将其输出到环路中,这样就产生了连续的载波信号。例如,当系统时钟为30.016MHz、控制环路运行于8kHz时,每个控制环路的时钟周期为3,752个。可以使用AMC1210的内置分频器能够降低系统时钟。如果选择降低4,则会占用938比特的PWM寄存器。
AMC1210拥有一个互补的PWM输出(PWM_P及PWM_N),其电流驱动能力最高可达100mA。这样就产生了全差分载波信号,其电压范围高达+/-5V(5V单电源),能够直接驱动旋转变压器。旋转变压器自身具有对PWM信号的低通滤波能力,所以旋转变压器的正弦及余弦绕组可以直接产生幅度整齐的调制正弦波。因为载波信号的谐波也落在滤波器传输函数的陷波频率上,故谐波的影响并不严重。
应用验证
图4中的电路可用于对这种新概念进行验证。
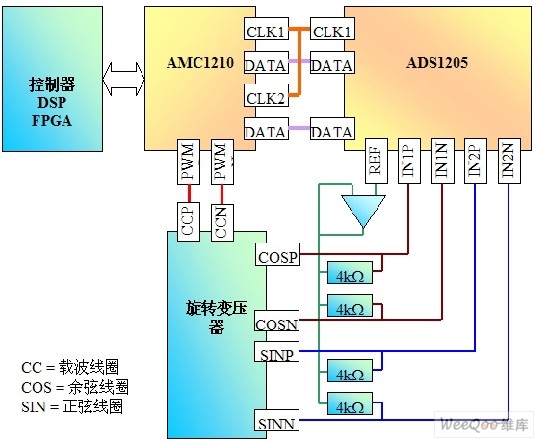
图4:测试验证电路
AMC1210的PWM输出直接驱动旋转变压器,ADS1205的参考引脚(REF)将正弦及余弦信号的电压限制在正确范围之内。由于ADS1205参考输出具有高阻抗特性,不能提供足够的驱动电流,故需增加缓冲。旋转变压器另一侧的输出引脚的阻抗低,因而可以直接驱动调制器的输入端。
将频率转换器用于驱动马达,会导致旋转频率不佳。50Hz的信号频率表示马达转速为3,000RPM。可以看出背景噪声低于-120dB,即有效位超过14位。
本文小结
ADS1205与AMC1210的组合单价约为5美元(批量为1,000片),而其它专用产品的最低单价为20美元左右,具有标准组件的解决方案单价约为7.50美元。除具有价格优势之外,Δ-∑架构还可确保更出色的信噪比,这个方案的ENOB为15.5,专用产品解决方案的ENOB为12。其缺点是数字滤波器会产生固定的时间延迟,马达控制器环路需要对此时延进行调整。