
直流电动机具有良好的起制动性能,能大范围内平滑调速,因而在可控的电力拖动领域中得到了广泛的应用。然而传统的直流调速系统所采用的是由分立元件构成的复杂PID模拟控制系统。常规PID控制虽然具有结构简单、稳定性好、易于工程实现等优点,但该方法过分依赖控制对象的模型参数,鲁棒性差。对于复杂系统如对机器人的控制,由于其负载模型参数的大范围变化以及非线性因素的影响,常规PID控制难以达到满意的效果。本文提出一种基于LM3S8962ARM芯片的模糊控制系统,以替代传统的PID模拟控制,提高直流调速系统的控制性能。
1 控制系统的控制方案
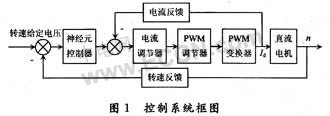
系统控制框图如图1所示,采用串级控制,分为转速环(外环)和电流环(内环)。为了提高系统响应的快速性和限流的必要性,电流环仍采用传统的PI调节器,而转速则采用神经元控制器,以提高其鲁棒性。
单神经元自适应PSD算法控制框图见图2。
2 单神经元PSD自适应控制算法
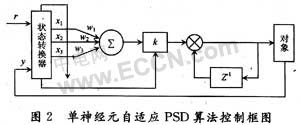
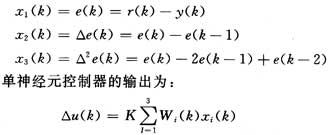
图2中状态转换器的输人为设定值r(k)和过程输出y(k),转换器的作用是获得单神经元的三个输入量x1(k),x2(k),x3(k),在这里:
其中:Wi(k)(i=1,2,3)为对应于神经元输入xi(k)的加权系数。
控制器总输出为:

z(k)为教师信号,在这里取z(k)=e(k)。这是因为控制效果主要与e(k)和△e(k)有关。为了保证学习算法的收敛性和控制的鲁棒性,一般采用规范化学习算法以构成单神经元PSD控制规律,所以单神经元自适应PSD的控制算法如下:


控制系统以LM3S8962为核心,LM3S8962是基于ARM?CortexTM-M3的32位RISC控制器,具有内部存储器、4个通用定时器、遵循ARM FiRM规范的看门狗定时器、控制器局域网(CAN)、10/100以太网控制器、同步串行接口(SSI)、2个完全可编程的UART、4个10位ADC、模拟比较器、I2C、6个PWM输出、2个QEI模块。
3 控制系统的硬件设计
系统主电路采用晶闸管三相全控桥式电路,控制电路主要由LM3S8962芯片构成,一是完成速度脉冲的采样、控制算法的实现和控制极脉冲的输出等。二是完成起、停控制,键盘及显示器接口等。系统硬件方框图如图3所示。

从LM3S8962芯片出来的PWM输出信号,经过光电隔离驱动,送入晶闸管控制极,实现对全控桥的控制。
电流检测回路采用霍尔电流传感器CSNP661检测直流电流Id,当检测到电流值超过设定的限幅值时ARM立即进行中断处理,封锁输出给晶闸管的PWM信号,并发出声光报警信号。
系统采用测速发电机测量电动机转速,把转速信号转换成电压信号,经分压电阻送给ARM的ADC转换输入中断。
4 控制系统软件设计
软件结构:本系统软件采用功能模块设计方法,软件由系统、主程序、中断服务子程序及其他相关的子程序组成。
主程序主要完成芯片的初始化、变量的初始化等。
中断程序主要包括ADC转换结束中断等几个部分。
在串行口中断中,主要完成与主机信息的传输,根据制定的串行通信协议,按照主机的命令进行各种动作。
在ADC中断中,通过ADC转换的数值经过计算得到当前负载电流值,进行电流环调节,每经过一定次数电流环调节,就进行一次速度环调节,以保证系统按照要求进行控制。
5 仿真实验
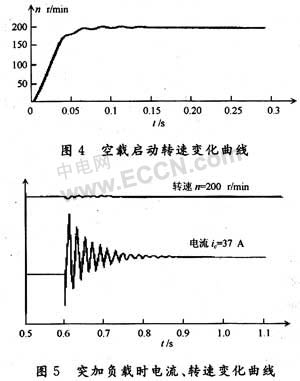
为检验本系统的控制性能,对直流电机(额定数据:380 V,37 A,200 r/min)进行了空载起动和突加负载的仿真实验,得出电流和转速的变化曲线如图4和图5所示。
6 结语
实验结果表明,本系统结构简单,控制可靠,能保持快速响应及无静差和较小超调等优良性能,采用了高性能高精度的ARM芯片的模糊控制器,能达到很高的控制精度。同时,系统具有较强的扩展能力,可以通过串行口或者以太网与上位机通信。