
引言
X62W万能铣床是一种高效率的加工机械,在机械加工和机械修理中得到广泛的应用。万能铣床的操作,是通过手柄同时操作电气与机械,以达到机电紧密配合完成预定的操作,是机械与电气结构联合动作的典型控制,是自动化程度较高的组合机床。但是在电气控制系统中,故障的查找与排除是非常困难的,特别是在继电器接触式控制系统,由于电气控制线路触点多、线路复杂、故障率高、检修周期长,给生产与维护带来诸多不便,严重地影响生产。时随着工业自动化的发展,对工业智能化程度的要求越来越高,以及市场经济要求制造业对市场需求做出迅速反应—生产出小批量、多品种、多规格、低成本和高质量的产品。为满足这一要求,生产设备和自动生产线的控制系统必需具有极高的可靠性与灵活性,这就需要使用智能化程度高的控制系统来取代传统的控制系统,使电气控制系统的工作更加灵活、可靠,更容易维修,更能适应经常变动的工艺条件。基于这些问题,本文提出了利用西门子S7-200和触摸屏对X62W 型卧式万能铣床的继电接触式电控系统进行技术改造的方案。
1 X62W万能铣床工作原理及继电器接线图
1.1 工作原理
主电路中有三台电动机,M1是主电动机,拖动主轴带动铣刀进行铣削加工;M2是进给电动机,拖动升降台及工作台进给;M3是冷却泵电动机,供应冷却液。三台电动机共用一组熔断器FU1作短路保护。每台电动机均有热继电器FR作过载保护。其中以主电动机的热继电器FU1和冷却泵电机的热继电器FU2作总的保护,它们的常闭触头串在控制电路的总线上,而进给电动机的热继电器FR3只作进给系统的保护,其常闭触头接在进给控制电路中。因为主电动机要求不频繁的正反转,用组合开关SA5控制倒相。进给电动机的正反转频繁,用接触器KM3和KM4进行倒相。冷却泵在主电动机起动后方可开动,另有手动开关SA1控制。主电机采用两组起动按钮SB3和SB4并联,两组停止按钮SB1和SB2串联.接触器KM1是电动机M1的控制接触器,SQ7是位置开关,用作主轴变速的冲动开关。主轴的起动,按下起动按钮SB3或SB4,接触器KM1通电吸合并自锁,主电动机M1起动.当主电动机起动后,KM1的辅助触头接通控制电路的进给控制部分,才可以开动进给电动机。 电机的转速达到一定速度时接通速度继电器,当按下停止按钮SB1或SB2时,接触器KM2得电,主轴电机反转。
工作台向右进给,当主轴起动后,工作台控制电源接通.将位置开关SQ1旋转,SQ1-1常开触头闭合,接触器KM3通电吸合,电动机M2正转.当运行到预定位置时,位置开关SQ1复位,电动机M2停止转动。
工作台向左进给,将位置开关SQ2旋转,SQ2-1闭合,SQ2-2断开,接触器KM4通电吸合,电动机反转,工作台向左移动。
当SA3-1、SA3-3闭合SA3-2断开时,电流通过11、SQ6、15、SQ4-2、16、SQ3-2、17、SA3-1、18、SQ1-1(或11、SA3-3、21、SQ2-2、22、SQ1-2、17、SA3-1、18、SQ3-1)、19、KM4、20 ,KM3得电M2正转,工作台向下运动。
当SA3-1、SA3-3闭合SA3-2断开时,电流通过11、SQ6、15、SQ4-2、16、SQ3-2、17、SA3-1、18、SQ2-1(或11、SA3-3、21、SQ2-2、22、SQ1-2、17、SA3-1、18、SQ4-1)、24、KM3、25, KM4得电M2反转,工作台向上运动。
当SA3-2闭合 SA3-1、SA3-3断开时,电流通过11、SQ6、15、SQ4-2、16、SQ3-2、17、SQ1-2、22、SQ2-2、21、SA3-2、19、KM4、20, KM3得电。当SA3-2闭合,SA3-1、SA3-3断开时,进给电机M2正反转就组成了互锁,SQ1,SQ2,SQ3,SQ4位置开关控制圆盘旋转不同的位置。
不论电动机正反转,接触器KM3和KM4的线圈电流都由SQ1-2和SQ3-2接通.若机床正在向左进给 机床的联锁问题,当SQ2或SQ4被旋转时,它们的常闭触头SQ2-2或SQ4-2是断开的,所或向右进给时,发生误操作,压着上下前后手柄,则一定使SQ3-2或SQ4-2中的一个断开,使KM3或KM4断电释放,电动机M2停止运转,以确保安全。位置开关SQ6为进给变速冲动开关。
冷却和照明控制,冷却泵只有在主电动机起动后才能起动,所以主电路中将M3接在主接触器KM1触头后面, SA1控制冷却泵。照明电路用安全电压36伏用开关SA4控制。
2 X62W 型万能铣床控制系统的硬件构成
2.1PLC的选择和硬件设计。
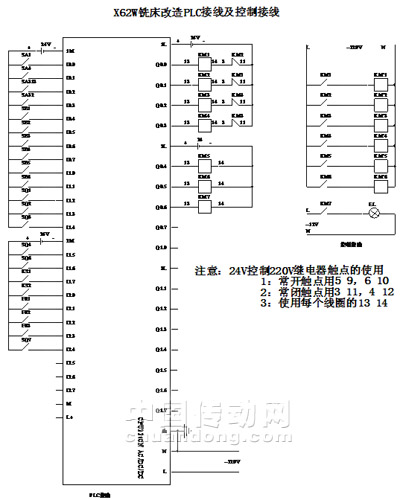
根据X62W万能铣床电气控制要求,输入输出均为开关量,需要PLC监测的输入信号有8个按钮,5个行程开关,两个选择开关,输入点为 21点,PLC输出控制信号有6个继电器,1个照明灯,共7点。因此,选用了西门子S7-200PLC,具体配 置 如 下 :CPU226CN AC/DC/DC型(6ES7 216-2BD23-0XB8),自带24点输入,16点输出,自带两个接口2个RS-485接口 PORT0和POT1,一个通讯接口,能满足控制要求。PLC的I/O口分配是根据其控制对象的特点和控制要求,将I/O口的输入输出口与相应的电气设备相连,达到控制和检测的功能,具体I/O分配如表1。进行完I/O分配后,进行PLC硬件设计,PLC外接硬件电路如图1。
I/O分配表

表1
内部寄存器I/O分配表

表2
2.2 PLC编程:
根据机床控制要求,PLC语句表如程序1,在程序设计过程中,用了6个内部辅助继电器来简化程序设计,主轴电机正反转互锁和进给电机正反转互锁提高了系统运行的可靠性。在程序中将不同的控制方式均分开设计,这样程序结构简洁、清晰。由于整个系统用触摸屏控制,它可替代物理按钮和开关及其指示灯,所以在编程序是这些按钮和开关均使用了内部寄存器M0.6-M3.1, 把下面程序的输入寄存器改成相应的内部寄存器即可。内部寄存器程序,如程序2
程序1 手动控制程序

程序2 自动控制程序

3、触摸屏选择及设计
触摸屏越来越多的用在了工业中,方便,易于远程控制。根据X62W铣床的控制要求,我们用NTOUCH触摸屏和MCGS组态软件配合PLC来替代控制柜上的按钮和选择开关等物理元器件,并且还可以通过触摸屏来监视铣床运行动作情况。
3.1 MCGS组态编辑
通过对系统的分析,在本系统中,依靠MCGS系统设计组态画面,实现对系统操作和监控。如图2所示。

图2 系统控制总体画面
以上提到此系统的输入和输出均是开关量,所以在MCGS组态的实时数据库中定义的名字类型也要为开关型的,如图3

图3 实时数据库
3.2 通讯连接
既然用MCGS控制此系统,那么怎么才能让其与西门子PLC相互通讯,起到监控的作用?MCGS组态软件在设备窗口中建立系统与外部硬件设备的连接关系,使系统能够从外部设备读取数据并控制外部设备的工作状态,实现对工业过程的实时监控。根据此系统的控制要求以及控制方式,可以利用PPI电缆,相互传数据,以便实现监控。
在设备窗口中需要设置设备0-[通用串行口父设备]属性和设备1-[西门子S7-200PPI]属性,此时,还需要设置设备内部属性增加相应的PLC通道,和通道读写类型,输入通道多数用到的是内部寄存器,读写类型是只读类型,输出寄存器Q0.0~Q0.6读写类型,Q1.0.和Q1.1只读类型值读取SA313和SA32的开关信号,在实际通讯过程中,在设备属性设置中“串口端口号”设为0-COM1,通讯波特率设为:6-9600,数据位位数:3-8位,数据校验方式:偶校验,一位停止位,数据采集方式:同步采集。设置完后单击“确认”按钮返回。
为了西门子S7-200PLC与MCGS更好的通讯,必须在设备属性设置:[设备1]对话框中设置属性设备注释为:西门子S7-200PPI,初始工作状态为:启动,最小采样周期为:1000ms,PLC地址为:2,内部属性设置PLC通道要与实施数据库中所定义的名字相对应。如图4。

图4 PLC通道属性设置
编辑完毕组态画面,在上位机上试验成功,便可以通过上位机的网线接口用一根网线和触摸屏上的网线借口相连接,并且在MCGS嵌入式组态软件菜单栏中“工具”“下载配置”设置好IP地址,便可以下载到触摸屏中,如图8,然后,用PPI电缆连接触摸屏和PLC,母头连接触摸屏COM5口,公头连接在PLC接口上,即可实现丢掉控制柜面板上的按钮控制,用触摸屏的软按钮控制,画面生动,清晰。
4 结束语
本文所述方案是对原来的继电接触式模拟控制系统进行 PLC与触摸屏改造而成,已在实验室控制柜予以实施。运行结果表明,该 PLC 控制系统无论是硬件还是软件,控制稳定可靠,且尽大限度降低了操作的危险性。