
0 引言
随着软件无线电技术的发展,以及大宽带高分辨率多路信号和多种信号处理方式的采用,信号处理中的运算量与数据吞吐量急剧上升,于是,越来越多的系统采取多DSP的并行处理方式来满足实时处理的性能要求。并行处理系统通常由多个处理单元组成,并通过一定的方法将一个任务分成若干个子任务,再分别由各处理单元去完成。一个合适的系统结构往往可以大大提高系统的运行效率,简化软件的实现,并且方便软硬件的更新和维护。
1 ADSP-TS201简介
ADSP-TS201是美国模拟器件(ADI)公司继TS101之后推出的一款高性能处理器,可广泛应用于大存储量、高性能、高速度的信号处理和图象处理系统中。TS201本身提供有可实现互连所需的片内总线仲裁控制和特有的链路口。可以方便的以各种拓扑结构互连DSP,以满足大运算量的需求。TS201的主要性能指标如下:
◇最高工作主频可达600 MHz,指令周期为1.67 ns,可支持单指令多数据(SIMD)操作;
◇采用LVDS技术和DDR方式传输数据,单向最大速率为500 MB/s,数据吞吐量为4 GB/s;
◇4条128位数据总线可与6个4MB的RAM相连,其34位地址总线可提供4GB的寻址空间;
◇有4个链路口,每个链路口可提供1.2 GB/s的传输速率,并可同时进行DMA传输;
◇可通过共享总线提供无缝连接以用于片内集成总线的仲裁控制;
◇片上SDRAM控制器和片上DMA控制器可提供14条DMA通道。
2多DSP并行系统的结构
图1所示为常见的多DSP并行处理网络结构。TS201芯片在组成多DSP系统时,处理单元之间的网络结构一般可采用如下几种形式:
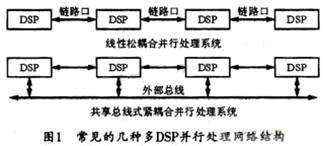
第一种是各处理单元有各自独立的数据存储器,它们通过通信口相连成分布式并行系统,称为松耦合式系统。松耦合式系统中的处理单元的连接方式很多,有线形、树形、星形、网孔、超立方体结构等。其中树形和星形网络的优点是网络管理容易,数据通信时寻径简单,缺点是处理单元数目较多时,“根”节点或中央节点处理单元的输入/输出吞吐量太大,容易造成通信瓶颈。超立体结构则以多维形式来增强网络的通信能力,它的优点是网络全对称,在节点连接特性、通信长度、算法的嵌入性、与其它连接形式的兼容性之间可提供很好的平衡,但随着处理单元个数的增多,该形式对网络硬件的要求也会增加。
第二种是共享总线或共享存储器系统,称之为紧耦合式并行系统。共享总线系统可使多个处理单元共同使用一套数据总线,其存储器所占用的地址段在各DSP中通常是相同的,这种结构的优点是简单,在DSP数目较少时,可以达到较高的加速比;但在DSP较多时,共享总线将造成频繁的总线冲突和等待,从而引起各处理单元等待总线令牌的时间大大增加。
另外,将上面两种结构结合使用的系统也很常见。这些方式在利用其外部总线构成一个紧耦合结构的数据通路的同时,DSP之间还可通过LINK口以流式松耦合结构的方式互连,两种结构相辅相成,能够适应不同算法的需求,以达到最佳的资源利用。但也会使软件变得比较复杂。
3 基于TS201的多DSP系统设计
复杂的电子信息战环境往往要求实时处理大量的信号脉冲,此时仅靠单系统已经不能适应超大运算量的要求,而并行处理,特别是多处理机并行处理才是解决多路大规模计算问题的可行途径。下面介绍一种基于TS201的DSP并行处理系统在机载雷达干涉仪中的应用实例。
3.1 系统结构设计
图2所示是一种机械雷达干涉仪的连接图。本系统的接收信号包括4路不同天线到达的脉冲。系统首先通过FPGA对采集到的本路信号进行频率、脉宽、相位等参数的测算,再将结果传人本路DSP,由DSP对本路的多个脉冲进行PRI分选和脉冲分组,再将所有各路的分选信息集中在一个DSP中算出辐射源的位置。系统可通过上位机选择两种工作模式:选择比幅天线,则进入比幅测相模式;选择干涉天线,则进入干涉测相模式。
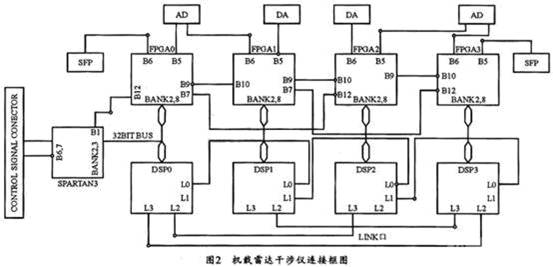
本系统中的4块TS201可通过链路口形成一个网状松耦合式系统。其中DSP0做为主节点进行工作模式字和结果的接收和转发。当其它节点结束了信号分选后,便可利用DMA通过链路口将4路脉冲信息集中在DSP0中以进行测相运算。
3.2 系统的软件实现
若要实时处理大量的信号脉冲,那么,满足信号实时处理的DSP并行处理系统软件就必须包括并行处理系统的控制管理软件和实时处理任务模块两部分。其中,系统控制管理软件主要维持处理接点的正常运转。由于此系统要求保证4块DSP同步运行,所以,每次进行测相的4路数据必须完全对应。这就要求主节点上的控制管理程序要能完成工作模式字和结果的接收和转发,同时要监控各个节点上的DSP状态。而其它DSP上的控制管理程序则主要协调计算过程和数据传输过程的流水切换。
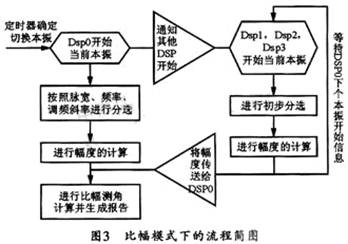
并行处理器的任务分配原则一般是每个DSP的运算应尽可能均衡。当流水线中某一段任务负载量大于其它段时,就可能会形成处理瓶颈而降低系统效率,从而直接影响整个系统的实时处理能力。在系统中的实时处理任务模块中,可用四片以并行处理方式来完成信号的实时处理。四片DSP可同时进行本路数据的分选,然后将本路处理的结果发往主节点。当主节点进行测相处理时。其它3片DSP将进行数据的矫正和存储。
把软件划分为两部分可使管理、开发以及调试独立起来,这样不但可简化系统设计,更重要的是,还可增加新的运算指令算法流程,同时,改进个别算法时,只需要改动个别子程序即可。图3是比幅模式下的流程简路。
4 结束语
本文给出了一种基于TS201的多DSP并行系统方案实例。事实上,在多并行系统的设计中,采用网状松耦网络结构可使网络管理更容易,同时也可方便地利用DMA传输来将多路信息集中在同一个节点进行运算。其对称结构也可使配套程序简单化,还可使多个节点重复利用。因此,本文可以作为设计多DSP并行系统的一种参考。