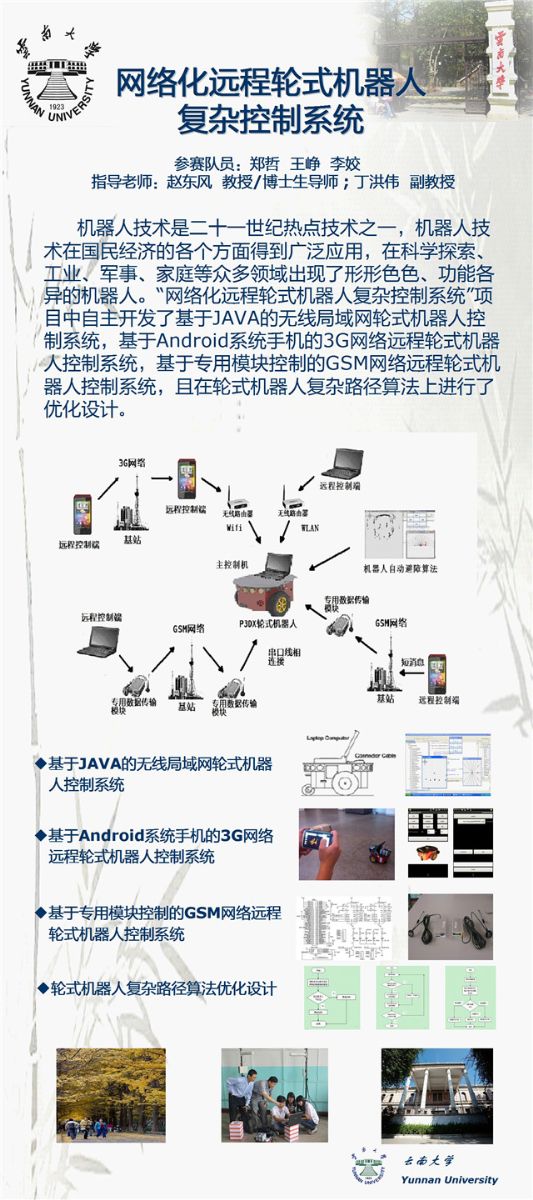
网络化远程轮式机器人复杂控制系统 第八届全国研究生电子设计竞赛 摘要:该项目自主开发了基于Java的无线局域网轮式机器人控制系统,基于Android系统手机的3G网络远程轮式机器人控制系统,基于专用模块控制的GSN网络远程轮式机器人控制系统,且在轮式机器人复杂路径算法上进行了优化设计。 关键词: 嵌入式操作系统 远程轮式 控制系统 网络化 Abstract: Key words : 原创声明:此内容为AET网站原创,未经授权禁止转载。