
1 引言
可充电蓄电池是一种最成熟、最常用的简单电源装置,常用的蓄电池类型有铅酸电池、镍氢电池、锂离子电池等,但他们普遍具有体积重量大、功率密度低、充电时间长、使用寿命短等缺点[1]-[3]。近年,超级电容器作为一种具有良好功率特性的新型储能装置受到了广泛的关注和研究。与常用的蓄电池相比,超级电容器具有功率密度高、充放电速度快、效率高、循环寿命长等优点,但其能量密度低,一般不能单独作为供电装置来使用[4]。有相关研究将二者结合组成复合储能系统,这种复合电源性能的发挥,需要依靠合理可靠的控制装置和能量管理方法。但这些储能装置都没有能量获取功能,不能为电源系统补充能量。在一些应用场合,如移动机器人、智能传感器节点等,要求电源有最大限度的持续工作能力。太阳能是环境中普遍可以被利用的一种能量,太阳能光电转换及其控制技术已经比较成熟,基于太阳能能量获取的方式对很多应用具有实际意义。
本文综合考虑太阳能光伏电池、蓄电池和超级电容器构成一种复合电源[5],研究了该复电源系统的开放式动态体系结构、系统组成和设计方法,并将其应用于移动机器人电源,取得了良好效果。
2 复合电源系统的体系结构
由光伏电池、蓄电池和超级电容器组成的复合电源系统可能有多种结构形式,最简单的结构就是将三者直接并联,但这样太阳能不能被充分利用,蓄电池和超级电容器的特性也不能充分发挥。图1 给出了本文采用的复合电源系统组成原理。在有光照的条件下,以太阳能为机器人能量的在线补充来源,蓄电池和超级电容器作为复合储能装置,可将多余的能量储存起来以备光照不足时使用。太阳能电池板是一种受光照强度和环境温度影的非线性直流电源,并且其输出功率还随外接负载的变化而变化,在相同光照强度和环境温度的情况下,其输功率的最大值只有在满足特定负载条件时才会出现。为了最大限度地利用太阳能,将太阳能电池板通过最大功率跟踪(MPPT) 控制器接入系统的直流母线。将蓄电池和超级电容器分别通过一个DC/DC 变换器接入直流母线,可实现对蓄电池和超级电容器输出功率的主动控制,实现能量的管理。蓄电池是主储能装置,为了减少电能通过DC/DC 变换器时的功率损失,可不采用蓄电池和直流母线间的DC/DC 变换器,将蓄电池直接与直流母线相连。
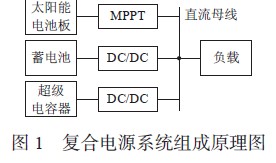
图1 中给出的是一个完整的复合电源系统的组成结构,在不同的应用中可根据实际需要进行选择和裁剪。图中的负载不仅包括只消耗功率的传统意义的负载,还代表可回馈功率的负载,如工作于再生制动状态的电机。另外,负载的功率通常是动态变化的,太阳能电池板的输出功率也是变化的,蓄电池和超级电容器有可能工作于放电状态或充电状态。因此,图中的变换器一般采用双向DC/DC 变换器。
采用一般的电源与负载的静态模型已不能描述复合电源的动态特性,考虑能量的双向流动,忽略具体的物理实现,可抽象出图1 中复合电源的动态体系结构模型,如图2 所示。
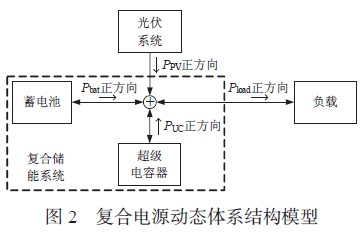
图中的蓄电池和超级电容器组成复合储能系统,光伏系统只能单向输出功率,蓄电池、超级电容器和负载都支持功率的双向流动。PPV、Pbat、PUC 和Pload 分别表示光伏系统、蓄电池、超级电容器和负载当前时刻的输出或输入功率,图中的小箭头指向分别规定了各功率的正方向。某一时刻各功率的方向和大小由电源系统的工作状态决定。
3 复合电源系统的设计与控制方法
3.1 复合电源的硬件电路设计
结合该复合电源在移动机器人上的应用,设计了复合电源的硬件电路。蓄电池直接与直流母线相连,图1 中与超级电容器相连的DC/DC 变换器主电路采用Boost/Buck 型双向升压/ 降压电路实现,如图3 所示。电路中,VH 端接直流母线,VL 端接超级电容器。当MOS 管T2 关断,T1 工作于开关状态,电路实现升压功能,可使超级电容器放电;当MOS 管T1 关断,T2 工作于开关状态,电路实现降压功能,可使超级电容器充电。T1 和T2 采用PWM 信号驱动。由于图1 中的太阳能电池板只能输出功率,且机器人所能安装的太阳能电池板的输出电压不可能太高,因此,MPPT 变换器的主电路只采用单向Boost电路结构(图3 中电路除去T2 和D2 以外的部分),将电压升高后再接直流母线。
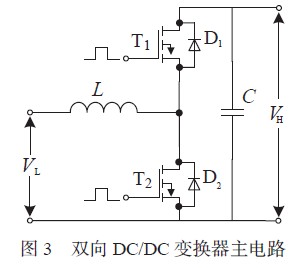
图3 中双向DC/DC 变换器的驱动电路采用专用的半桥驱动芯片IR2110,其可分别输出半桥电路高端和低端的两路驱动信号,结构紧凑,外电路设计简单。当驱动低端MOS 管T2 时,只需一路PWM 信号输入IR2110 即可。当驱动高端MOS 管T1 时,需要控制器输出一对互补对称的PWM 信号给IR2110的输入端,这是因为对高端桥臂的驱动是通过自举方式实现的,低端MOS 管的互补导通才能实现对自举电容的充电。
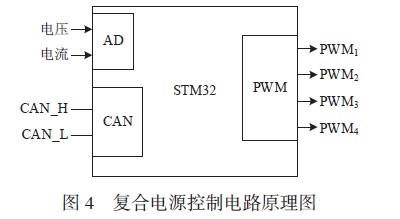
复合电源控制电路的CPU 采用意法开云棋牌官网在线客服公司(ST) 的32 位微控制器STM32 芯片,其使用ARM 公司具有突破性的cortex-M3 内核,具有功耗低、成本低、集成度高、外设丰富等优点,其集成了多路片上AD,具有多种通讯接口,且通过其内部时钟定时器可实现多路的PWM 信号输出,方便实现开关电路的控制。本文基于STM32 芯片设计的复合电源控制器的原理如图4 所示。片上AD 采集电源的电压和电流信息,多路PWM 信号输出驱动开关管,预留的CAN 总线接口方便与机器人的运动控制器通讯。
3.2 复合电源的控制方法
复合电源系统能量的管理与分配,是通过对以上两个DC/DC 变换器的控制实现的。控制方法设计时,考虑负载优先利用光伏电池的输出功率,不足的部分由复合储能装置补充。只要蓄电池仍有一定的容量空间,对光伏电池的控制则采用MPPT 方式,否则就关闭光伏电池的输出,即本文对光伏电池的控制和其他部分的控制是完全解耦的。MPPT 控制有很多种实现方法[6],本文采用与文献[7] 中类似的扰动观察法,具体实现过程不再详述。
在图2 的复合电源动态体系结构中,相对蓄电池- 超级电容器复合储能系统而言,可将光伏电池输出功率的变化等效为驱动负载功率的变化,即将光伏系统和机器人的驱动负载视为复合储能系统的等效负载,可使复合电源控制方法的分析得到简化。可见,本文所提出图2 中的复合电源体系结构是一个可裁剪、可重组的动态体系结构,对复合电源控制方法的分析起着重要作用。由图2 中的功率关系可知

式中: 为复合储能系统的等效负载功率。根据以上的分析,对与超级电容器相连的双向DC/DC 变换器,采用如下基于逻辑门限的控制方法。
为复合储能系统的等效负载功率。根据以上的分析,对与超级电容器相连的双向DC/DC 变换器,采用如下基于逻辑门限的控制方法。
(1)等效负载功率 即复合储能系统放电。此种情况下的功率分配规则为:如果
即复合储能系统放电。此种情况下的功率分配规则为:如果
 否则,当超级电容器电量充足时有
否则,当超级电容器电量充足时有 若此时超级电容器已欠电,则只能由电池单独提供功率,这是一种非正常工作状态,说明电源系统已不能提供足够的功率。
若此时超级电容器已欠电,则只能由电池单独提供功率,这是一种非正常工作状态,说明电源系统已不能提供足够的功率。
(2)等效负载功率 即复合储能系统充电。此种情况下的功率分配规则为:只要超级电容器的电量达到最高限值
即复合储能系统充电。此种情况下的功率分配规则为:只要超级电容器的电量达到最高限值

以上各式中, 表示蓄电池最大允许放电功率,
表示蓄电池最大允许放电功率, 和PUC 分别表示分配给蓄电池和超级电容器的功率。基于该规则实现的软件程序流程如图5 所示。在程序设计时,为避免系统在逻辑门限值切换时出现振荡,在各逻辑门限值附近均设置了一定的滞环宽度。
和PUC 分别表示分配给蓄电池和超级电容器的功率。基于该规则实现的软件程序流程如图5 所示。在程序设计时,为避免系统在逻辑门限值切换时出现振荡,在各逻辑门限值附近均设置了一定的滞环宽度。
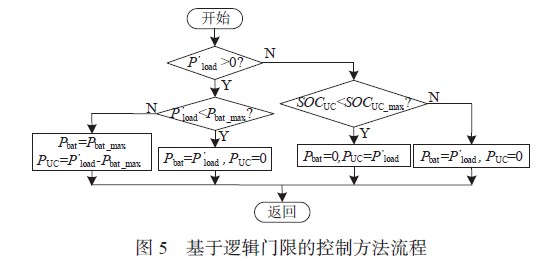
表1 给出了复合电源系统需要检测或计算的参数,这些参数是对双向DC/DC 变换器进行控制的依据。
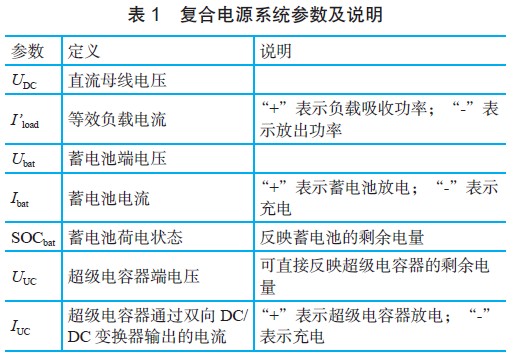
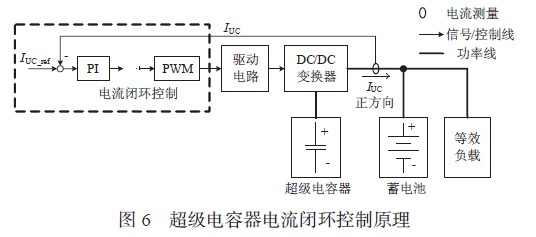
从以上分析的功率关系除以当时的母线电压,即可得到超级电容器需要输出电流的给定值IUC_ref,采用电流闭环的PI调节器控制DC/DC 变换器的输出电流IUC 及时跟踪IUC_ref,即可实现等效负载电流在蓄电池和超级电容器间的分配。
3.3 模型仿真
在Matlab 环境下建立了移动机器人复合电源系统的仿真模型。复合电源中的光伏电池及MPPT 控制系统采用一个受控直流电流源来模拟,蓄电池采用Simpowersystems 中的battery 模型,超级电容器采用RC 串联模型。负载为电机,用一个直流电机模型模拟。模型的主要参数如下:蓄电池采用额定电压为14.4V 的Li-ion 电池模型,容量为1.5Ah;超级电容器容量为15F。为了进行对比研究,对单一蓄电池模型也进行了仿真。设计了一个时间为25s 的机器人工作循环,仿真过程模拟了机器人负载电流的动态变化,在该工作循环下分别对单一蓄电池电源和复合电源模型进行了仿真,图7 给出了仿真结果对比。
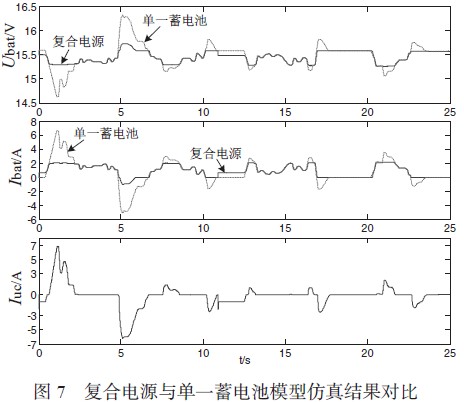
图7 中的蓄电池端电压(Ubat) 和充放电电流(Ibat) 曲线显示出:采用单一蓄电池电源时,Ubat 和Ibat 的波动很频繁,Ubat 最大波动幅度可达2.5V,充电和放电峰值电流高达5A 和7A。蓄电池端电压的急剧上升和跌落,是由过大的充电和放电峰值电流造成的,这对蓄电池有很大的损害,且电源电压的过大波动容易造成机器人工作不稳定;而采用复合电源时,Ubat和Ibat 都得到了有效地平滑,蓄电池的充电和放电电流都被限制在了2A 以内。由超级电容器电流曲线IUC 可以看出,复合电源中,超级电容器对负载的峰值电流进行了及时的补充或吸收,从而避免了蓄电池受到过大充放电电流的冲击,且负载回馈的电流基本全部被超级电容器吸收。复合电源中蓄电池得到了有效的保护,仿真结果说明了移动机器人采用复合电源的优越性。
4 复合电源在移动机器人上的应用实验
将本文复合电源应用于移动机器人设计了实验样机,见图8。复合电源中的蓄电池选用额定电压14.4V 的Li-ion 电池,容量为1.5Ah。超级电容器采用6 个额定电压2.7V、容量120F 的单体电容串联构成。所用光伏电池的最大输出功率为5W。复合电源的控制算法通过STM32 的软件实现。

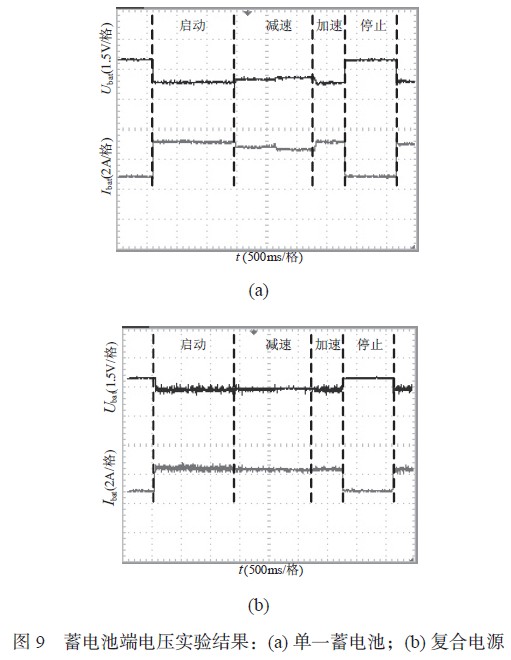
针对相同的工作循环过程,对采用单一蓄电池电源和复合电源的机器人分别进行了实验。该循环过程包括:机器人启动、加速、减速等工作过程,图9 为两种条件下蓄电池端电压变化实验结果。由图可知,若采用单一蓄电池,相对于空载时的电压跌落最大值可达1.5V,且随机器人工作状态的改变波动明显;若采用复合电源,蓄电池端电压被保持在一定范围内,受机器人工作状态变化的影响很小,最大跌落电压0.5V 左右。而蓄电池端电压的波动和跌落是由其电流变化引起的,图9 的结果说明超级电容器对过大的负载电流提供了有效补充,减轻了对蓄电池的损害。实验结果与模型仿真的结果一致。
5 结论
本文研究了光伏电池- 蓄电池- 超级电容器复合电源系统体系结构和设计方法。利用复合电源的动态体系结构模型的开放性和可重组性,在复合电源控制方法的设计过程中采用了相互等效的思想,使设计得到了解耦和简化。在此基础上针对该复合电源在移动机器人上的应用进行了系统设计和模型仿真,并设计了移动机器人复合电源系统实验样机。实验结果与仿真结果一致,说明了本文复合电源设计方法的可行性,也验证了移动机器人采用复合电源的优越性。在保证机器人动力性能的基础上,超级电容器对蓄电池电流起到了良好的补充和平滑作用,可延长蓄电池的使用寿命,并可利用周围环境的太阳能为机器人在线获得能量补充,提高机器人的持续工作能力。