1 引言
采用时间控制、光照控制等方式控制的路灯照明系统存在着路灯使用寿命短、管理开销大、电能浪费、无法远程监控以及故障维修反应效率低等现象。随着人们生活质量的提高及科学技术的进步,对城市路灯的要求越来越高,不仅要求安全、节能、维护方便,还要求其能美化夜景,彰显城市魅力;例如上海市博园安装的无线景观路灯照明,为其夜晚增添了不少的色彩。
目前国内外路灯系统正朝着节能、单灯控制以及远程监控的方向发展。本文基于无线网络技术,设计了一套采用Zigbee技术实现的路灯控制实训系统; 该系统可实现路灯的远程实时监控及数据采集存储等功能。
2 系统硬件设计
系统由安装在路灯灯杆上的路灯节点、无线网络及监控中心组成,结构如图1 所示,路灯节点和监控中心需要配备无线通信模块。
图1 系统结构图
2. 1 无线网络
无线网络采用Zigbee 技术,使路灯工作现场与系统监控中心可靠通信。这种技术主要应用在数据传输速率不高且短距离传输的各种电子设备之间,非常适合工业控制、环境监测等场合,具有低功耗、低成本和低复杂度等特点。本系统Zigbee 模块采用CC2530片上系统作为控制电路的核心,具有256KBFLASH,在接收和发射模式下,电流损耗分别低于25mA 和34mA.模块电源由外部稳压电源提供5V电压,以确保各节点长时间稳定工作。
根据路灯系统特点,网络采用树形连接,以便灵活扩展节点和自组网络。与PC 机串口RS232 连接的Zigbee 模块为网络协调器,起着组织、管理网络和发号施令的作用;当网络有节点加入时,它分配地址给新节点,因此不能掉电也没有低功耗状态。
与路灯单元串口连接的Zigbee 模块为路由器,起着中继器的作用,可以收发数据也可以转发数据,承担着与上位机和相邻节点通信的任务。
2. 2 路灯节点
路灯节点由路灯控制器、电源模块和Zigbee 模块组成,完成现场数据及控制命令的处理、控制LED 灯开关及调光的任务。
路灯控制器选择高性能、低功耗的8 位AVR 微处理器ATmega16 作为核心部件,该单片机输入/输出口可以自由设定,驱动能力强,集多种器件与多种功能于一身,大大减少了外围器件的使用量,降低了电路的复杂程度。控制器的外围电路包括信号检测、亮灯驱动和故障检测等电路。
信号检测部分由光敏电阻电路和热释电红外传感器电路组成。光敏电阻5537 用于对环境光检测,从而控制灯光的亮度;热释电红外传感器DYPME003感应距离0 ~ 7 米可调,用于判断是否有行人或者车辆通过,并根据设定值调节灯光亮度。
考虑到LED 路灯高效节能及其应用日趋广泛,采用LED 作为光源,并采用XN2115 芯片驱动。系统选用1W、3. 2 ~ 3. 6V 的LED 灯4 颗。路灯故障检测信号取自XN2115 芯片的SW 点的电压,将该点电压通过大电容平波后与电压比较器的基准电压进行比较,比较结果的高低电平送入单片机处理,并将故障信息送至上位机实现故障报警、位置显示等功能。
路灯节点使用了5V 及12V 的直流电。将220V交流电通过整流桥KBP210 变为12V 直流电,为LED 驱动电路和故障检测电路提供电源,功率可达40W; 12V 直流电源再通过LM2596-5. 0 集成三端稳压器输出5V 直流电源,输出电流最大可达3A,具有很好的线性和负载调节特性,为Zigbee 模块、单片机及其他外围电路提供电源。
2. 3 监控中心
监控中心由PC 机和Zigbee 模块组成,提供系统信息,具有遥测、遥控及存储和管理数据功能的人机界面显示,可以对整个路灯系统进行工作状况的实时监控。
PC 机可以通过无线通信网络采集路灯状态,例如环境光强度、用电量、亮灯率等,并可向路灯节点发送控制命令,路灯节点根据这些命令对LED 灯进行操作,实现系统的按需控制及每盏路灯的实时监控。
3 系统软件设计
系统上电后进行初始化,检测系统是否正常工作,如果正常则按照路灯控制界面进行路灯状态检测或者对路灯进行输出控制,使路灯按照既定程序实现开/关状态,并经由Zigbee 网络实时显示信息。
监控界面可选择各Zigbee 模块的网络节点号,搜索网络内的各个模块,将控制命令发送至指定的路灯节点,也可实时显示路灯状态信息和底层数据包。
3. 1 现场信号采集、检测与处理程序
路灯现场环境光采集模块经由光敏电阻得到电压值,并通过ATmage16 内部的1 路10 位ADC 模数转化电路将其转化为数字信号。为了平滑采样信号,提高系统抗干扰能力,设计中采用了数字滤波方式,每次转换完闭后,ATmage16 会自动产生中断信号,将本次和前8 次数据取平均值送给单片机处理。
当有人经过时热释电红外传感器会输出高电平,经过后续处理电路,单片机得到一个低电平。为了避免重复触发,人体检测中断触发方式采用下降沿方式。
路灯的调光是通过给XN2115 芯片的DIM 引脚端上施加PWM 信号来实现。ATmage16 内部自带四通道的PWM,设置为快速PWM 模式、OC2 复位、32 分频。当OCR2 的值从0 到256 变化时,LED 灯从全亮到全灭。
3. 2 通信程序设计
系统通信程序包括路灯与路灯节点之间的通信及其路灯节点与监控中心之间的通信两部分。
1) 路灯节点之间的通信实现。
路灯节点之间实现通信,一方面是为了了保证路灯在夜间没有行人或车辆通过时处于节电状态,即微亮状态,另一方面是当路灯节点检测到道路上有行人或车辆通过时,使该路灯转为全亮,并通知下一盏路灯转为全亮,以确保行人或车辆的出行安全。
路灯节点之间采用串口通信,通信参数配置为异步通信、8 位数据、无奇偶校验、一个停止位及无倍速。串口的发送程序采用查询方式,接收程序采用中断接收方式。
路灯节点控制器之间的发送程序为:
sysDRFarr [0] = 0xfd; / /点对点数据传输指令
sysDRFarr [1] = 1; / /数据长度
sysDRFarr [2] = sysAddress [( LEDNumber )* 11 + 1]; / /目标地址高
sysDRFarr [3] = sysAddress [( LEDNumber )* 11 + 2]; / /目标地址低
sysDRFarr [4] = 0; / /数据
put_ arr ( sysDRFarr,5) ; / /发送一串数据帧
接收处理程序为:
void PointToPointRecive ( void)
{
LEDPWM_ Adjust ( usartReceiveBuf [3 ]) ;
/ /接收到的数据
sysDRFarrShortAddress [0] = usartReceiveBuf[4]; / /来源地址高
sysDRFarrShortAddress [1] = usartReceiveBuf[5]; / /来源地址低
usartReceive_ Init ( ) ; / /串口数据初始化
}
2) 路灯节点与监控中心之间的通信。
路灯节点与监控中心之间的通信一方面可以通过上位机为路灯节点配置相关信息、发送控制指令,另一方面可以接收来自路灯节点的现场运行信息,实现系统在监控室进行路灯系统操控和故障查询、报警等功能。
采用PC 机串口与网络协调器相连,实现读取路灯节点信息或控制路灯运行状态。例如PC 机要读取当前系统路灯信息,利用串口调试工具观察PC机向无线网络发送和接收数据,如图2 所示。发送指令格式为: FB + 02 + 14 + 路灯编号( 本系统中路灯编号为01,02,03),表示读取编号为01、02、03 的路灯节点当前信息;路灯节点做出回应,通过无线网络返回路灯信息格式为: 环境光强+ 路灯光强+ 故障情况。路灯节点1 返回的信息表明当前所处环境光强度为E2(由强到弱范围: FE ~ 00)、路灯亮度FB ( 由灭到全亮范围:FE ~ 00) 、无故障00( 有故障为01) 。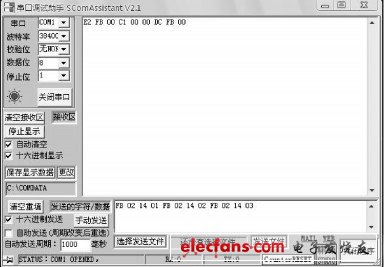
图2 串口调试界面
3. 3 监控软件功能设计
系统监控中心程序包括: 显示监控程序、调试配置程序、系统参数配置程序及存储工作运行数据程序。
(1) 显示监控程序。
显示监控程序包括路灯状态信息、街道状态信息、报警信息。通过显示监控界面可以实现街道选择; 观察路灯当前光通量、功耗、工作时长及是否故障; 自动统计该街道的总用电量、亮灯率;系统自动工作的时间段; 显示当前街道故障的路灯编号及该路灯在什么时间发生故障。
(2) 调试配置程序。
调试配置程序包括串口配置、Zigbee 读取及配置、路灯调试。通过串口配置界面设置相应的串口配置参数;通过Zigbee 的配置程序可读取Zigbee 模块的网络ID 号、波特率、网络地址、MAC 地址,可以方便的设置Zigbee 模块的网络ID 号、波特率;通过路灯调试界面可以读取该街道路灯的环境光强、路灯光强、功耗、是否故障等信息。可以对该路灯进行调光测试及设置该路灯开始工作时间。
(3) 系统参数配置程序。
系统参数配置程序包括校正路灯节点时间、设置系统工作时间、配置街道地址。在系统运行过程中,系统时间可能会与当前时间有差别,通过系统时间校正,可以使系统时间与PC 机时间同步; 可以设置系统正常工作的开关机时间与街道地址。
(4) 存储工作运行数据。
在系统运行的过程中,下位机发送的路灯信息及报警信息都会保存到数据库中。同时街道及路灯的配置信息也保存在数据库中,并可方便用户导出及打印信息。
4 系统功能测试
4. 1 系统测试
由于Zigbee 网络能自组网,因此在构造试验系统时我们配置了最小系统: 1 个网络协调器节点和3个路由器节点,系统采用主从方式,一般处于休眠状态,当有中断请求时激活节点进行工作。路灯高度为0. 7m,路灯间隔为0. 8m,现场路灯系统如图3、图4 所示。
图3 路灯1 微亮,2、3 全亮
图4 路灯1,2 微亮,路灯3 全亮。
图3 为小车运行到路灯2 位置的状态。路灯2全亮,并通知路灯1 转为微亮、前方路灯3 转为全亮。若1 号节点热释电红外传感器检测不到信号并收到了前方路灯的信息,则状态转为微亮; 当小车向前运行进入3 号节点热释电红外传感范围时,3号灯通知2 号灯转为微量,如图4 所示,对应的监控界面如图5 所示。监控界面中淡黄色路灯表示路灯微亮、深黄色路灯表示路灯全亮。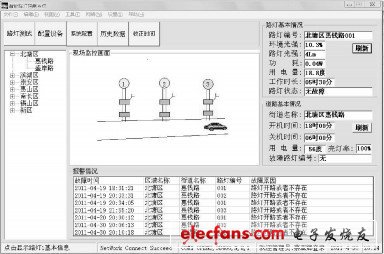
图5 监控界面。
运行路灯控制系统软件时需要进行系统配置、通信配置、Zigbee 配置等操作; 在运行中可对路灯节点进行调光、校正时间等操作。如图6 为系统工作时间设置,图7 为路灯节点时间校正。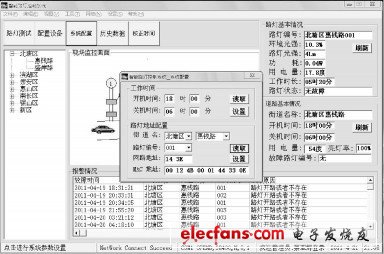
图6 系统工作时间设置。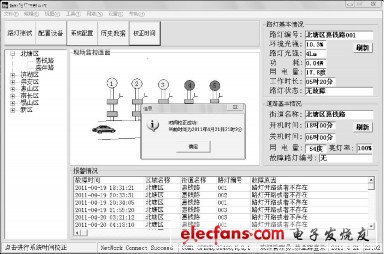
图7 系统校正时间。
4. 2 系统功能
路灯控制方式可分为手动控制方式和自动控制方式,均可在监控中心操作或进行参数设置。系统可实现以下功能:
1) 可进行单灯远程监控,并可调节灯具亮度。
2) 可根据环境光自动开关路灯,并可调整灯具亮度,保证使用需要。
3) 根据道路是否有行人/车辆通过实现亮度渐变。路灯夜间无行人/车辆通过,路灯微亮; 当检测到远方有行人/车辆接近时,路灯由微亮转为全亮,并通知前方路灯由微量转为全亮;车辆/行人通过后,路灯又转为微亮。
4) 具有路灯故障检测功能。当有路灯损坏,可以进行声光报警,并指示故障路灯的具体位置。
5) 具有数据统计和存储功能。可提供路灯用电量、亮灯率和功耗等数据,并可查询历史记录。
6) 系统具有休眠状态,降低系统功耗。
5 结束语
智能化和网络化控制路灯是未来路灯控制的发展方向和必然趋势。随着技术的进步和城市发展的需求,无线传感节点集成度会越来越高,价格会越来越低,路灯控制系统的功能会越来越多,路灯的自动化管理和无线通信技术的结合应用也必然会越来越广泛。
本系统采用Zigbee 协议实现了路灯控制模拟系统的实时监控和网络化管理。系统网络扩展灵活、现场易于安装,操作界面友好、管理方便。本系统已用于自动化类专业的大学生实验实训教学,有助于学生了解无线通信、传感技术、单片机技术及其在城市路灯控制系统中的应用。
