
0 引言
白光LED照明方式以高效、低功耗、节能环保等特性,已经广泛获得大家的认可。从本质上来说,LED就是可发光的二极管,它的发光强度与通过它的正向电流成正比,且存在导通电压,当电流大小为20 mA时,正向压降一般为3~3.5 V。很多时候,单个LED发光强度并不能满足实际应用的需求,还必须将多个LED串联或并联使用,这就需要大的电压或电流来驱动,而不同的制作工艺,甚至不同批次,LED都存在着性能不匹配的问题,这也为合理设计驱动带来难题。所以,虽然原始的电源有很多种类,但都不能直接给LED供电。这就要求根据不同的需要采取升压或者降压,以及恒流或恒压的驱动方式进行驱动。
1 常见LED驱动器工作原理
1.1 线性稳压驱动器
最早成套出现的线性稳压驱动器出现于20世纪70年代,那时是以NPN管作为稳压器件的,如图1所示。这种稳压器件在输入电压与输出电压之间要求2Vbe的电压,当输入电压低于2Vbe时,NPN管进入饱和,稳压器将失去稳压能力。为了减少压差,出现了组合型的稳压器,如图2所示,即用PNP管驱动NPN管的基极,但压差也接近1Vbe。20世纪80年代中期,市场上出现了低压差线性稳压器,如图3所示。与NPN稳压器不同,PNP稳压器压差不是Vbe的函数,而是PNP管Vce的函数,这个电压值要低得多,随着制造工艺的成熟,PNP稳压器压差已经小于500 mV。
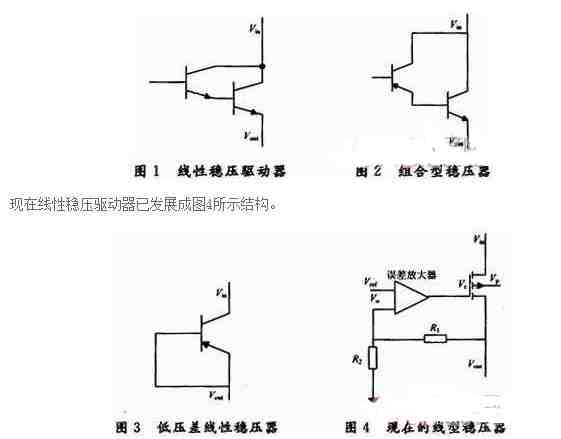
线性稳压驱动器是指在线性区或饱和区工作的晶体管、场效应管从输入电压中分去多余的电压,产生可调节、稳定且精确的直流电压,通常由稳压器件、误差放大器、反馈电路以及基准电压组成。稳压器件通常是一个MOS管,相当于一个压控电阻,由栅极电压控制电阻大小。输出电压Vout是由稳压器件与负载分压得到的Vout=Vin-Vp,若输入电压Vin或负载发生变化,控制端电压Vc也随着变化,控制MOS管阻值,达到调整MOS管分压Vp大小的目的,使Vout保证稳定。线性稳压驱动器也可通过将采样电阻与负载进行串联,反馈电压Vo=Iout×R1,保持R1大小不变,则反馈电压可反映输出电流大小的变化,进而改成线性稳流驱动器,其具体工作原理与线性稳压驱动器基本一致。
线性稳压器的效率是比较低的。由原理可知,该驱动器的输出电压是由输入电压减去MOS管分压Vp而得到的,而这部分电压完全是转变为热能消耗掉,所以为了提高驱动器效率,一般要求Vp越低越好。将输入/输出电压差较低的线性稳压驱动器称为低压差线性稳压器,简称LDO。
1.2 电荷泵驱动器
最早的理想电荷泵模型是Dickson J在1976年提出的,如图5所示,其基本思想就是通过电容对电荷的积累效应而产生高压。后来Witte-rs J,Toru Tranzawa等人对Dickson J的电荷泵模型进行改进,提出了比较精确的理论模型,并通过实验加以证实。
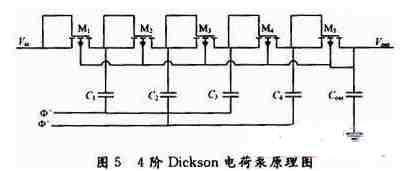
现代电荷泵主要由开关阵列、震荡电路、逻辑电路和比较器来实现DC—DC的转换,驱动模式也由以前的单模式转变成自适应多模式,主要的形式有单模式(如2X模式)、双模式(如1X/2X模式)和多模式(如1X/1.5X/2X模式)等,下面结合双模式1X/2X电荷泵分析电荷泵的工作原理。
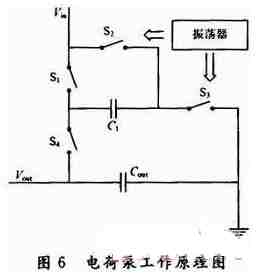
如图6所示,当电荷泵工作在1X模式下时,振荡器不工作,S1和S4直接导通,此时,Vin=Vout;当电荷泵工作在2X模式下时,振荡器输出占空比为50%的方波,使S1,S3和S2,S4轮流导通。当时钟信号为高电平时,S1和S3导通,S2和S4截止,Vin与C1连通,对C1进行充电,使Vc =Vin;当时钟信号为低电平时,S1和S3断开,S2和S4导通,Vin通过C1串联对外供电,所以有稳态时,Vout=Vin+Vc=2Vin。
电荷泵驱动电路,不仅能有效进行升压降压输出,而且还能非常简便地进行负压输出,这是电荷泵驱动器相对其他两种驱动器的一大优势。
如图7所示,它的基本原理与Dickson电荷泵是一致的,但是利用电容两端电压差不会跳变的特性,当电路保持充放电状态时,电容两端电压差保持恒定。在这种情况下将原来的高电位端接地,从而可得到负电压输出。

式中:Pin为输入总功率;Lout为负载LED上流过的总电流;VLED为LED的正向导通压降;M为电荷泵的升压倍数;Iq为电荷泵功率管的驱动电流和其他模块的静态电流。由上式可以看出,电荷泵的升压倍数M越大,电荷泵的转换效率越低,因此,在满足LED驱动电压,即Vout> VLED的条件下,要尽量使电荷泵工作在低升压倍数的模式下。
1.3 电感式开关稳压驱动器
电感式开关稳压驱动器简称开关电源(Switching Power Supply),因电源中起调整稳压控制功能的器件始终以开关方式工作而得名。早期的开关电源频率仅为几千赫兹,当频率达到10 kHz左右时,变压器、电感等磁性元件发出很刺耳的噪声,直到20世纪70年代,开关频率突破了人耳听觉极限的20 kHz,噪声问题才得以解决。随着开关频率的不断提升,驱动器的体积减小,效率提高。20世纪80年代,出现了采用准谐振技术的零电压和零电流开关电路,也就是软开关技术。这种电路使开关开通或关断前的电压、电流分别为零,解决了电路中的开关损耗和开关噪声问题,使开关频率可以大幅度提高,从而使开关电源进一步向体积小、重量轻、效率高、功率密度大的方向发展。
电感式开关稳压驱动器的核心是电子开关电路,根据负载对电源提出的输出稳压或稳流特性的要求,利用反馈控制电路,采用占空比控制方法,对开关电路进行控制。在开关管闭合的时候,将电源的能量储存在电感中,在开关管关断的时候,电感中的能量流入电容,这样就实现了能量的传输。
电感式开关稳压驱动器有通常两种控制方式:一是保持开关工作周期不变,控制开关导通时间的脉冲宽度调制方式(PWM),该方式是在输入电压或负载变化时,控制电路通过输出电压或电流与基准电压的差值进行闭环反馈,调节主电路开关器件的导通脉冲宽度,使得电感式开关稳压驱动器的输出电压或电流保持稳定;另一种是保持导通时间不变,改变开关工作周期的脉冲频率调制方式(PFM),基本工作原理就是在输入电压或负载变化的情况下,控制电路通过输出电压与基准电压的差值进行闭环反馈,在保持开关开启时间不变的情况下,控制开关周期的长短,即控制开关频率,来调整开关占空比,以达到稳定输出电压或电流的目的。由于PWM方式电路简单,且输入/输出范围较PFM方式更广泛(PFM通常用于轻负载、低电压、低电流情况下),所以得到了广泛应用,下面主要介绍两种PWM驱动方式。
1.3.1 电压控制型PWM
结构示意图如图8所示。
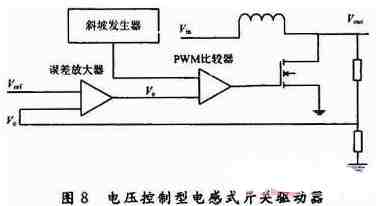
在PWM控制器中,对输出电压Vo进行检测,加至运放的反相输入端,固定参考电压Vref加至运放的正相输入端。误差放大后输出直流误差电压Ve,加至PWM比较器的正相输入端;将斜坡信号发生器产生锯齿波信号Vosc加至PWM比较器的反相输入端。Vc和Vosc经PWM比较后输出一个方波信号,该方波信号的占空比随着误差电压Vc变化。当输出电压降低时,Ve值变大,经PWM比较后,输出方波占空比减小,MOS管导通时间增加,Vin对电感充电时间增加,Vout升高。
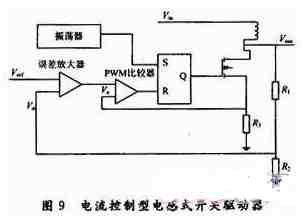
1.3.2 电流控制型PWM原理
结构示意图如图9所示。该电路和电压控制型的区别在于,该电路有外控制环和内控制环两部分电路。当输出电流Iout降低时,误差放大器输出增大,PWM输出为0;当振荡波上升沿到来时,MOS管导通,Vin对电感充电,电流增加,通过采样电阻R3反馈电压增加,当反馈电压超过Ve时,PWM输出为1,当振荡器下降沿到来时,MOS管关闭,电感上电流对外输出。电流控制模式与电压控制模式一样具有占空比与输出电压大小成反比的关系外,还具有以下特点:外控制环路控制电流最小值;内环控制电流最大值。
2 各种驱动器优缺点比较
对于LED驱动方式而言,每种LED驱动都有它的适用范围,也有它们各自的优缺点,搞清楚各自的优缺点,可以更好地根据实际情况,设计合理的LED驱动电路,这可以通过效率、工作电压、噪声干扰、输出调节、反应速度以及安装尺寸和成本来进行比较分析。
2.1 整体效率
线性稳压驱动器的整体效率是比较低的,主要是由于线性稳压驱动器是依靠功率管分去多余的电压来达到稳压效果,而这部分功耗是完全无用的,导致了驱动器效率的下降。所以使用线性稳压驱动器时,应尽量减少输入与输出电压差,其实际转换效率通常在50%~95%之间;由于基本电荷泵其只能倍数提供输出电压,其输出电压不能稳定在某个值上,所以通常在电荷泵电路外部连接额外的LDO,转换成稳压电荷泵,这样导致了电荷泵式驱动器效率在本身功率鞘耗的基础上,额外增加的LDO驱动器的功率消耗,效率通常在70%~85%;电感开关式驱动器以及基本电荷泵驱动器的损耗主要来自内部MOS器件静态电流损耗、外部电容以及采样电阻的功率损耗,其效率可达80%~90%。
2.2 工作电压
线性稳压驱动器由于分压工作原理,只能进行降压输出,这就决定了它只能工作的输入电压高于LED驱动需求电压的情况下工作;电荷泵驱动器,可进行降压或者升压,但如果需要进行高倍数或多模式调节输出电压,则需连接大量的开关和电容,使得效率大幅降低,所以一般应用于过度电压驱动,即输入电压与输出LED驱动电压差别不大的情况;电感式开关驱动器由于利用了磁场储能,不论是升压、降压还是两者同时进行,只需调整采样电阻的比例,就可以进行大范围的输出电压调整,且不会因输出调整改变驱动器效率,所以其应用范围最广,可广泛运用于各种输入电压之下。
2.3 噪声干扰(EMI)
线性稳压驱动器由于其工作原理是采取分压方式稳定输出电压,本身工作不需要电容或电感进行稳压操作,MOS管也始终工作在线性状态下,不需要进行关断或开启操作,所以本身不会产生噪声电压、电流和电磁干扰;电荷泵由于不采用电感,所以其EMI影响基本可以忽略,在输出电压过程中,MOS管需要进行开关操作,所以会产生一定的电源噪声,但由于没有使用电感,所以噪声较小,可以通过外接一很小的电容消除;电感式开关驱动器是电源噪声和EMI的主要来源,由于MOS管的频繁开关操作,PWM会在MOS管开关的固定频率内产生大的EMI干扰,PFM更是在其频率的可变范围内产生干扰,所以供应商通常需要采取提高电感式开关工作频率的方法,使其EMI落在系统频带之外,另外由于电感的原因,MOS管通断瞬间会产生较大的尖峰电流或电压,输出电流和电压也存在相位差。
2.4 输出调节及响应速度
线性稳压驱动器可以根据产品的需要,通过调整外部采样电阻的比例,调整MOS管的分压,对输出电压进行控制,而且其电路简单,响应速度很快;电荷泵驱动器本身不可随意调整输出电压的数值,只能通过采样电压反馈进行倍数调节,通过串接LDO也可进行电压调节,但这样也会降低驱动器的响应速度,响应速度较LDO慢,电荷泵对输出电压调节的优势在于它可通过简单设计,进行正负两种电压的输出,面其他两种驱动方式则需要另外的设计电路才能达到输出负值电压的效果;电感式开关驱动器,对输出电压的调节也只需调节采样电阻的比例,改变控制方波占空比,来调整输出电压,调整比较简便,但由于电路结构复杂,需进行多次比较放大,电感的存在也进一步减慢了电压调整的反应速度,所以响应速度最慢。
2.5 安装尺寸及成本
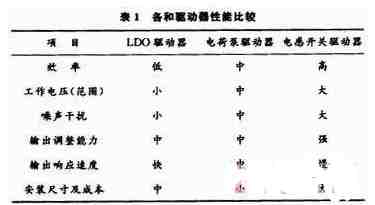
线性稳压驱动器电路构成简单,一般只需20~40个元器件就可组成,成本低,但由于MOS管也一直处于线性区或饱和区,发热量较大,所以需加装大的散热装置,以保证散热良好,确保系统稳定。电荷泵电路复杂程度居中,外接的电容体积也可通过提高开关频率而减小,而且现在贴片式电容也得到了很好的应用,使得电荷泵集成度大大提高,所需安装尺寸进一步减小。电感式开关驱动器电路最为复杂,成本最高,而且最少需外接一个电感、电容和肖特基二极管,特别是在需要屏蔽应用时,需另外加装屏蔽装置,成本更高,尺寸也更大。附对照表如表1所示。
3 LED照明实际电路应用
在了解了各种驱动器的工作原理和优缺点之后,可针对一些常见的LED照明驱动电路的应用情况进行简单的分类、归纳总结。
3.1 锂电池供电LED驱动
锂电池电压通常在2.5~4.5 V之间,通常采用锂电池供电的都是便携式设备,包括移动电话、MP4、笔记本电脑等,为了便于携带,设备体积小、重量轻,而且集成度高,较大的电磁干扰会对其他电路产生影响。根据便携式设备的实际情况,LED驱动需要达到以下要求:升压驱动;占用面积小;电磁干扰小;高转换效率。小型设备LCD照明只需将3~9只LED串并联使用,但对发光一致性要求高。大型设备LCD照明通常采取背光模块的方式。背光模块已将白光LED光源通过折射、导光以及其他一些工艺技术来处理光均匀度问题。所以对于发光的一致性要求较低。最佳电路结构是采用带LDO的电荷泵驱动方式,这种驱动方式能升压、占用面积小,且EMI干扰很小。
3.2 蓄电池供电LED驱动
蓄电池电压通常在12~36 V之间,输入电压始终高于LED管压降,这种情况下只需进行降压操作即可,如太阳能路灯、机动车灯光系统等。这种情况往往对LED发光的一致性要求较低;但对于发光亮度要求较高,所以常常采用大功率LED,同时考虑到应有尽量高的效率和较低成本,其最佳方案是降压式电感开关驱动器。
3.3 市电情况下的普通照明应用
市电供电是对LED照明最有意义的一种供电方式,是决定LED能否真正普及的一种应用,所以是LED照明必须研究和解决的重要问题。用市电供电,首要解决的是降压、整流问题,同时考虑到LED驱动电源会对电网产生影响,还要解决好电源噪声、电磁干扰和大功率因数问题,所以需采取电路隔离的方式,减少对电网的污染。对于中小功率的LED来说,最佳的电路结构是采用隔离式单端反激开关变换器。由于单端反激电路输出功率能力有限,对于数百瓦以上的应用情况,应选用输出功率更大的桥式开关变换器。
4 结语
随着便携式设备的迅速发展以及市电供电LED照明技术日益成熟,越来越多的设备采用了LED照明,对LED的驱动芯片的需求将进一步扩大。总之,白光LED的用途非常之广泛,其驱动电路的设计是非常关键的,只有针对不同的应用环境,采取合理的驱动方式,才能在实际应用中设计出最稳定、最合理的驱动电路。