
随着新型电力电子器件和高性能微处理器的应用以及电机控制技术和现场总线技术的发展,变频器向单元化、数字化、智能化和网络化方向发展。西门子公司6se70/6se71系列矢量型(vc)变频器和abb公司acs800/acc800系列直接转矩型(dtc)变频器都具备了单元化、数字化、智能化和网络化的特点,是目前高性能工程型变频器的代表。针对位能型负载的特点,6se70/6se71系列变频器和acs800/acc800系列变频器都设计了机械制动控制功能,也就是常说的抱闸控制功能,该控制功能的主要作用是:在传动单元停止或未通电时,可以通过机械制动将电机和被驱动设备锁停在零速状态,保证了位能型负载和传动单元及设备的安全。
2 变频器机械制动控制功能的目的及应用
2.1 机械制动控制功能的目的
对于位能型负载来说,由于重物具有重力的原因,如没有专门的制动装置,重物在空中是停不住的。为此,电动机轴上必须加装机械制动器,常用的有电磁铁制动器和液压电磁制动器等。多数制动器都采用常闭式的,即:线圈断电时制动器依靠弹簧的力量将轴抱住;线圈通电时松开。在重物开始升降或停住时,要求制动器和电动机的动作之间,必须紧密配合。由于制动器从抱紧到松开,以及从松开到抱紧的动作过程需要时间(约0.6s,因电动机的容量大小而异),而电动机转矩的产生或消失,是在通电或断电瞬间就立刻反映的。因此,两者在动作的配合上极易出现问题。如电动机已经通电,而制动器尚未松开,将导致电动机的严重过载;反之,如电动机已经断电,而制动器尚未抱紧,则重物必将下滑,出现溜钩现象。
2.2 通用型变频器机械制动控制的应用
2.2.1 通用型变频器机械制动控制
自变频器开始应用在位能型负载领域,其机械制动控制功能就是设计、维护的重点,由于通用型变频器本身的局限性,可以使用的资源并不是很多,在实际应用中,一般有以下控制方法:
(1)应用变频器的可定义开关量输出信号和故障输出信号构成机械制动控制信号;
(2)应用变频器的运行信号和故障输出构成机械制动控制信号;
(3)变频器的运行信号、开关量输出信号和故障输出信号、电流模拟量信号输入到plc,应用plc的编程控制功能设计机械制动控制条件,plc输出信号控制机械制动器。
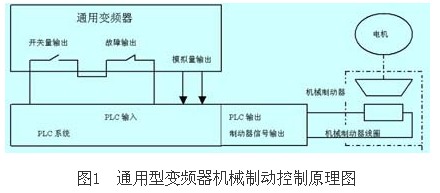
以上三种方法中,前两种一般应用在控制要求不高,简单的系统中,第三种应用在稍复杂系统中,控制精度要求较高,而且一般应用需要有plc系统。在90年代中期,济钢第一炼钢厂氧枪控制系统变频改造中,设计者充分应用了变频器可以使用的信号来完成机械制动的控制,是plc系统参与机械制动的一个典型例子。其控制思想是:plc系统采集变频器的运行信号、可定义开关量输出信号、故障输出信号和电流模拟量信号,其中可定义开关量输出信号定义为大于3hz输出;利用电流模拟量信号和plc的比较功能,设定开关机械制动的电流门槛值,plc系统综合以上条件设计出开关机械制动的条件,通过plc的输出控制机械制动器的线圈。plc系统参与通用变频器机械制动的电气原理图如图1所示。
2.2.2 通用型变频器机械制动控制过程
下面就以通用变频器可定义的开关量信号和电流信号为主信号的机械制动控制为例,来描述在启动停止中通用变频器机械制动控制的具体工作过程:
(1) 负载启动时机械制动控制过程
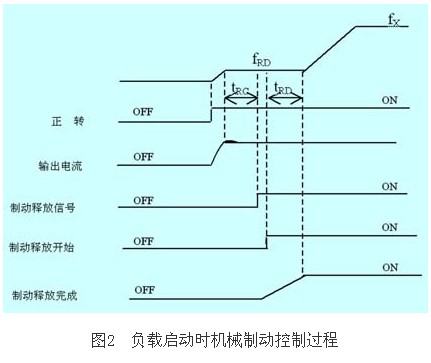
设定一个“升降起始频率”fsd当变频器的工作频率上升到fsd时,将暂停上升。为了确保当制动电磁铁松开后,变频器已能控制住重物的升降而不会溜钩,所以,在工作频率到达fsd的同时,变频器将开始检测电流,并设定检测电流所需时间tsc;发出“松开指令”当变频器确认已经有足够大的输出电流时,将发出一个“松开指令”,使机械制动控制器开始通电;设定一个frd的维持时间trd,trd的长短应略大于机械制动控制器从通电到完全松开所需要的时间;变频器将工作频率上升至所需频率
负载启动的机械制动控制过程如图2所示。
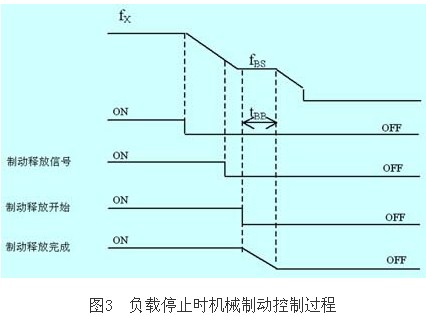
(2)负载停止时机械制动控制过程
设定一个“停止起始频率”fbs
当变频器的工作频率下降到fbs(如3hz)时,变频器将输出一个“频率到达信号”,发出机械制动控制器断电指令;
设定一个fbs的维持时间tbb
tbb的长短应略大于机械制动控制器从开始释放到完全抱住所需要的时间;
变频器将工作频率下降至0
负载停止时机械制动控制过程过程如图3所示。
2.3 工程型变频器机械制动控制的应用
2.3.1 工程型变频器机械制动的方法
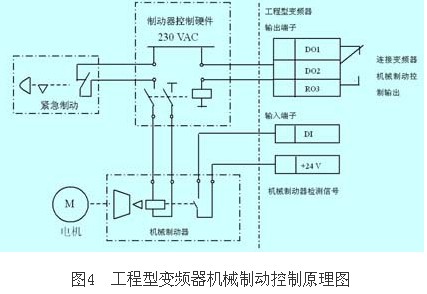
随着高性能微处理器技术的发展以及dsp技术在变频器中的应用,变频器不仅具备了优越的控制性能而且拥有了强大数字编程处理能力。西门子公司6se70/6se71变频器和abb公司acs800/acc800变频器在内部功能上都设计了机械制动控制功能,机械制动控制逻辑集成在变频器的应用中,用户通过简单的定义和硬线连接就可以实现复杂的机械制动控制功能。工程型变频器的机械制动控制思想是:变频器应用其采集到的各种信号,例如电流转矩信号、速度信号、故障信号等在内部通过逻辑计算得出一个开关机械制动控制器的信号,直接输出信号控制机械制动控制器,同时产生一些控制信号(例如内部给定使能、逆变器使能)来控制变频器的运行配合机械制动器的动作,该功能也可以利用机械制动控制器的检测元件来检测机械制动器是否正常。图4所示为一个工程型变频器机械制动控制的应用原理图。
2.3.2 工程型变频器机械制动的控制过程
下面就以工程型变频器机械制动控制功能实现的机械制动为例,描述负载在启动、停止时机械制动器的运行过程,工程型变频器机械制动控制的过程如图5所示。
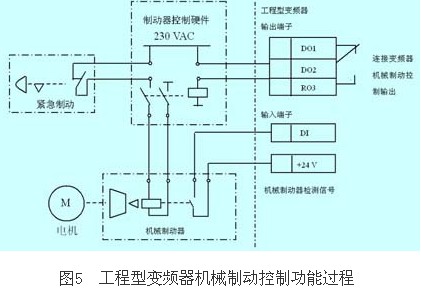
(1)负载启动时机械制动控制过程
设定一个“制动器打开时的启动转矩”ts
当变频器的启动指令以及外部速度给定使能信号都具备,变频器开始工作,为保证开机械制动时电机有足够的力矩,负载不至于下滑,设定一个打开制动器的门槛转矩值ts,门槛信号也可以应用电流信号;
发出“制动器打开指令”
当变频器确认已经有足够大的输出转矩(电流)时,其他逻辑条件都具备时将发出一个“制动器打开指令”,使机械制动控制器开始通电;
设定一个“制动器打开时间”tod
当变频器确认机械制动器已经打开,经过“制动器打开时间”tod后,通过控制功能控制内部给定使能,使变频器开始沿速度曲线升至所需速度。
负载启动的机械制动控制过程见图5中1到4所示过程。
(2) 负载停止时机械制动控制过程
设定一个“制动器闭合的转速”ncs
变频器设定一个“制动器闭合的转速”ncs,为保证制动器闭合时电机有足够的力矩,负载不至于下滑,设定一个关闭制动器的门槛转矩值ncs,制动器闭合的门槛信号一般使用速度信号;
发出“制动器闭合指令”
变频器停止运行时,当外部给定使能和外部速度信号停止后,速度沿变频器速度曲线下降,当变频器检测到ncs(如5%额定速度)时,变频器将输出一个“制动器闭合”信号,发出制动器断电指令;
设定一个“制动器闭合时间”tcd
当变频器确认机械制动器已经闭合,经过“制动器打开闭合”tcd后,通过控制功能封锁变频器内部给定使能(电机励磁)以及逆变器使能,变频器立即停止工作。
负载停止时的机械制动控制过程见图5中5到7所示过程。
2.4 通用变频器机械制动与工程型变频器的比较
工程型变频器的机械制动控制功能与通用型变频器机械制动控制功能相比,其优点主要有以下三个方面:
2.4.1 控制方法及思想
通用型变频器由于本身的局限性,其可以应用的资源并不多,应用变频器提供的输出点对于设计开关机械制动功能,这些也只是同级别控制信号;而工程型变频器具有的可编程性,内部采集到的各种信号可以直接或编程后提供给机械制动功能使用,工程型内部有专门的机械制动功能模块,其采用rs触发控制器,关机械制动条件优先,对于机械制动功能来说是最为合理和安全的,所以工程型变频器机械制动功能的控制方法及思想更为合理。
2.4.2 控制性能及精度
通用型变频器机械制动功能采用plc控制,也可以使机械制动功能考虑更多的条件,但是plc通过通讯等方式采集变频器的数据,然后做机械制动逻辑控制,系统至少一个循环的时间执行plc程序并运算出结果,然后通过输出模块控制机械制动控制器,加起来就算200ms,对于高精度要求的负载(比如电梯系统)来说,也是难以容忍的。对于工程型变频器,机械制动逻辑控制的运算时间,只是一个硬件运算的时间,工程型变频器机械制动功能可以让变频器的控制性能和精度达到最高。
2.4.3 安全性能
通用型变频器机械制动控制的控制仅采集变频器的信号,而不给变频器任何信息和控制,工程型变频器的机械制动控制功能提供变频器的内部给定使能和逆变器使能两个控制信号,通过这两个信号控制变频器的内部给定启动和逆变器停止,在机械制动器打开和关闭时变频器配合机械制动器的运行,保护变频器以及负载的安全,工程型变频器机械制动功能使变频器具有更高的安全性能。
3 西门子6se70变频器的特点及机械制动功能
3.1 西门子6se70变频器的特点
西门子6se70全数字矢量控制变频装置属于simovertmasterdriv系列,是西门子目前高性能变频器杰出产品,其全数字化和强大的软件控制功能、监视功能、记录功能和保护功能,为其装置运行的稳定性、可靠性提供了保证。其可选择的控制功能,既可以选择压频控制,也可以选择矢量控制,标量控制,适合于各种不同负载特性的要求;灵活的参数设置,可以方便修改参数、控制方式;兼容的通讯功能,可以与其它控制系统进行通讯;通过参数选择,变频器既可在本地控制,也可以通过现场总线构成的通讯网进行远程控制。
3.2 西门子6se70变频器机械制动功能
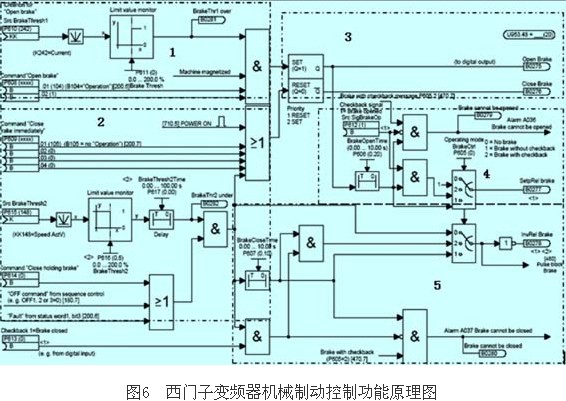
西门子6se70系列变频器机械制动功能非常强大,工程型变频器的可编程的优点显示的淋漓尽致,机械制动功能控制有:没有外部机械制动器的控制、有外部机械制动器不带机械制动器检测的控制和有外部机械制动器带机械制动器检测的控制三种方式,而且利用机械制动功能可以控制变频器的给定使能、逆变器使能使变频器快速停止,其控制原理框图如图6所示。
3.3 西门子6se70变频器机械制动功能的实现
3.3.1 机械制动控制功能原理
西门子机械制动控制是利用rs触发器原理,开机械制动器(s)的关系是“与”,所有条件都具备才能开机械制动器,关机械制动器(r)的关系是“或”,有一个关机械制动器的条件到就关机械制动器,而且rs触发器复位优先,在机械制动器实际应用中也就是机械制动器闭合优先,这种控制方式对于机械制动器控制更为安全。通过rs触发器可以得到两个内部开关量信号,其连接到变频器的开关量输出点就可以实现控制机械制动控制器;同时机械制动控制功能产生变频器内部给定使能和逆变器使能控制信号,可以根据实际需要选择使用控制变频器内部给定和逆变器的开通和关断。
3.3.2 机械制动控制的组成
如图6所示的是西门子变频器机械制动功能框图,可以分为7个部分:开机械制动条件、关机械制动条件、开关机械制动控制信号、控制给定积分使能信号、控制逆变器使能信号、开机械制动检测功能的报警信号、关机械制动检测功能的报警信号。其主要的部分分述如下:
(1)开机械制动条件
开机械制动器的逻辑关系是“与”,也就是所有条件都具备才能开机械制动器,在该功能中,一共有四个条件,其中电机励磁为固定条件,其他三个条件可以设定。参数p608可以设定两个开关量控制信号,一般使用一个变频器的运行信号(b104)即可;在该功能设定中最重要的是开机械制动器门槛控制的设定,参数p610是定义选择的参考量,常选用电流信号(kk242),p611是参考信号额定数值的百分数,根据实际需要定义,一般为20%左右,开机械制动条件的原理见图6中1所示部分。
(2)关机械制动条件
关机械制动器(r)的条件是“或”,有一个关机械制动器的条件到就关机械制动器,在该功能中,一共有6个条件,其中电源停止为固定条件,其他5个条件可以设定。参数p609可以设定四个开关量控制信号,一般使用一个变频器的未运行信号(b105)即可;在该功能设定中最重要的是关机械制动器门槛控制的设定,参数p615是定义选择的参考量,常选用速度信号(kk148或kk91),p616是参考信号额定数值的百分数,根据实际需要定义,一般为10%左右,需要注意的是参数p617,应用该参数可以把关机械制动器的信号由一个下跳沿信号变成一个宽脉冲信号,常定义为0.5s,关机械制动器门槛信号还需在停止信号、无故障信号和参数p614中的一个为常1时有效。关机械制动条件的原理见图6中2所示部分。
(3)开关机械制动控制信号
经rs触发器处理后,得到两个机械制动控制信号开机械制动控制信号(b0275)和关机械制动控制信号(b0276),开关机械制动控制信号的原理见图6中3所示部分。
(4)控制给定积分使能信号
西门子变频器可以通过参数p605选择三种机械制动功能控制模式,当选择为无机械制动(p605=0)时,给定积分使能信号(b0277)为常1;当选择有机械制动不带检测信息模式(p605=1)时,当机械制动信号打开时,通过参数p606设定的时间后,启动内部给定使能,停止时,当机械制动信号闭合时,通过参数p606设定的时间后,封锁内部给定使能;当选择有机械制动带检测信息模式(p605=2)时,当机械制动信号打开时,通过参数p606设定的时间并检测到制动器打开信号后,启动内部给定使能,当机械制动信号闭合时,通过参数p606设定的时间并检测到机械制动器返回信息后,封锁内部给定使能。应用该功能控制字p564需定义为b0277,机械制动控制给定积分使能原理见图6中4所示部分
(5)控制逆变器使能信号
控制逆变器使能信号主要来自关机械制动条件中关机械制动器门槛控制信号,系统启动后逆变器使能信号(b0278)为1信号,变频器选择为无机械制动(p605=0)时,当关机械制动门槛控制信号条件具备,立即封锁逆变器使能信号;选择有机械制动不带检测信息模式(p605=1)时,当关机械制动条件具备时,通过参数p607设定的时间后,延时封锁内部逆变器使能信号;选择有机械制动带检测信息模式(p605=2)时,当关机械制动门槛控制信号条件具备时,通过参数p607设定的时间并检测到机械制动器返回信号后,立即封锁内部逆变器使能信号。应用该功能控制字p561需定义为b0278,机械制动控制逆变器使能原理见图6中5所示部分
3.3.3 机械制动控制信号的输出
西门子变频器机械制动控制信号可以应用三种方式的输出:
(1) 使用x101的开关量输出点(+24v);
(2) 通过扩展eb2板的开关量信号输出(+24v);
(3)利用x9端子的4,5(一对220v的无源点)进行输出。实际应用中,机械制动控制器的控制电压一般采用220v,使用前两种输出,控制信号还需要用中间继电器转换,增加中间环节就是增加控制时间和故障点。
在以上三种输出方法中,应用控制信号x9(4,5)输出直接参与机械制动控制器为最好。
4 西门子6se70变频器机械制动功能在济钢副枪中的应用[4]
4.1 济钢副枪起升变频控制系统
济钢三炼钢工程是济钢集团做强做大的重点工程,其转炉控制系统应用了达涅利-康乐斯公司的副枪技术。副枪电气传动控制系统包括副枪起升驱动系统、副枪旋转驱动系统、apc系统(探头自动装卸装置)。
4.1.1 副枪起升驱动设备
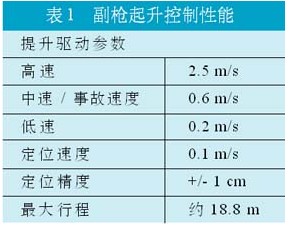
副枪起升设备位于卷扬平台上,包括一55kwac电机,dc抱闸,齿轮箱,卷扬筒,用于速度控制的测速发生器和两个用于高度测量的脉冲发生器(第二个脉冲发生器是出于安全角度考虑安装的)。一旦脉冲发生器间出现不允许误差,只能以低速进行停止降枪和提枪操作。事故方式下,副枪可以通过事故dc蓄电池从转炉中提出,除此之外,没有其它任何动作。副枪起升控制的工艺要求如表1所示。
4.1.2 副枪起升变频控制系统
副枪起升电气控制系统由两套变频控制器组成:正常模式变频器、应急模式变频器。正常模式主要完成副枪的手动、半自动、计算机控制三种模式的操作;应急模式完成事故状态下操作。副枪起升驱动电机是55kw,正常模式选择的是西门子75kw变频器(6se7031-2ef60),制动单元选择的是50kw(6se7028-0ea87-2da0),反馈装置选择的是脉冲编码器(1024p/r),因为现场距离设备将近100m,选择数字测速机dt1(6se7090-0xx84-3db0)对信号进行放大、修复。应急模式选择的是西门子75kw变频器(6se7031-2ef60),不带制动单元和反馈装置。正常模式、应急模式变频器均带输入、输出电抗器消除谐波、抑制尖峰电压。
4.2 机械制动控制功能在副枪变频器系统中的应用
在副枪起升控制中,正常模式使用的是有外部机械机械制动带机械制动信号检测的功能,应急模式应用的是有外部机械机械制动不带机械制动检测的控制模式,而且应急模式未设计制动单元,在此种模式下利用具有的机械制动信号控制变频器给定使能和逆变器信号使能对变频器进行控制。
4.2.1 正常模式
正常模式的开机械制动条件是变频器运行信号和变频器电流等于电机额定电流的20%,在这两个条件都具备才开机械制动,保证开机械制动时电机有足够的力矩,负载不至于下滑。关机械制动的条件有变频器停止和电机速度等于额定速度5%,利用速度检测信号来实现关机械制动,其控制安全性优于利用检测的电流信号,因为对于双环控制系统来说,速度环是稳定的,在系统停止过程中速度信号是稳定变化。
正常模式变频器机械制动控制使用了机械制动检测功能,外部机械制动上安装一限位(x101,6开关量输入)作为检测机械制动是否到位信号,开机械制动时,在开机械制动条件到而在1.0s内机械制动检测信号未到则认为是故障状态,封锁变频器(逆变器信号使能),并报警a036;关机械制动时关机械制动条件到而在1.6s内机械制动信号一直保持则认为是故障状态,封锁变频器(给定使能),并报警a037。
在副枪正常模式下,机械制动控制信号利用x9(4,5)输出直接参与机械制动接触器控制。
4.2.2 应急模式
应急模式的变频器机械制动控制基本上与正常模式变频器机械制动控制相同,由于在应急控制方式下,没有使用制动单元,所以关机械制动的速度阀值很低,以免大的回馈电压冲击变频器。应急模式使用无机械制动检测信号控制方式,该控制方式应用的是控制开关机械制动信号在定义时间内不动作,则封锁变频器的给定使能和逆变器信号使能。副枪应急模式下,机械制动控制信号利用x9(4,5)输出直接参与机械制动接触器控制。
4.3 副枪机械制动控制参数应用
副枪提升正常模式变频器、应急模式变频器的机械制动控制参数分别选用带机械制动检测信号模式和不带机械制动检测模式,其变频器机械制动控制参数如表2所示。

5 结束语
应用工程型变频器的机械制动控制功能,能很好地实现位能型负载在开始升降或停止时,要求制动器和电动机的动作之间,必须紧密配合的要求,该功能的实现保证了位能型负载和传动单元及设备的安全。但是需要注意的是,在各种安全规定和相关标准(iec61800-2)中变频器被定义完全驱动单元和基本驱动单元,没有列为安全器件,因此不能将安全完全依赖于变频器的制动器控制功能性能上,而应严格执行特殊的安全规定[3]。