
引言
PID控制技术是目前应用最广泛的控制技术,PID控制是一种应用历史悠久、工业界比较熟悉的简单控制算法。自1992年Hagglund提出预测PI控制器(Hagglund,1992)的思想以来,预测PID算法得到了逐步的发展和完善,并成功的应用在一些复杂对象的控制上。控制理论由于它产生的巨大经济效益吸引了越来越多的关注,大量的先进控制算法应用在纷繁复杂的工业过程中,也缩小了理论和实践之间的差距。
预测算法和PID结合在一起的控制器。PID控制器和过程的滞后时间无关,而预测控制主要依赖过程的滞后时间,根据以前的控制作用,来给出现在的控制作用。而这种PID控制算法将PID的简单性、实用性、鲁棒性和模型预测控制算法的预测功能有机的结合起来了。
本文运用Toeplitz方程求解丟潘图方程,减少了预测控制计算负担,缩短了预测控制器在线优化时间,同时解决了系统时滞引起的控制问题,整定了PID控制参数,达到了预期的效果。
问题的提出
近几十年来,控制理论由于它产生的巨大经济效益吸引了越来越多的关注,大量的先进控制算法应用在纷繁复杂的工业过程中,也缩小了理论和实践之间的差距。另一方面,传统的PID控制器,由于其简单稳定易操作的特性,仍然在控制市场占有相当大的使用份额。所以在现今全球竞争日益激烈的市场环境下,通过先进控制改进传统的控制器,优化传统的控制方法来获取经济效益提高企业竞争力,已成为一种趋势。
但是复杂工业过程存在着难于建模、关联复杂、对象结构与参数时变、干扰与环境不确定、要求与约束多样性等特点,传统的最优控制基于对象的精确数学模型,它在工业环境中并不适用,这已为工业过程的实践所证实,基于优化的控制显然优于单纯调节。所以就带来了问题:如何以合适的方式将优化结合到动态控制中,形成适应于复杂工业过程的优化控制模式,预测控制就满足了这点要求。
本研究课题将广义预测控制和经典PID控制方法相结合,用预测优化原理解决大时滞系统的控制难题。通过对Diophantine方程快速求解,避免了传统GPC算法中递推求解Diophantine方程的繁杂过程。
基于Toeplitz方法改进的GPC
2.1GPC的基本表达
首先,性能指标J函数表达如下:
(1)
其中,e(i)是对象输出和参考平滑曲线之间的误差,即![]() 。N是预测时域,M是控制时域。
。N是预测时域,M是控制时域。![]() 是控制加权常数。
是控制加权常数。
可以把以上方程写成向量形式:
(2)![]()
其中,![]() 是预测输出误差向量,Y是未来输出向量,
是预测输出误差向量,Y是未来输出向量,![]() 是未来控制增益向量。
是未来控制增益向量。
2.2介绍Toeplitz方程
给定一个单输入单输出被控对象传递函数模型:
(3)![]()
其中,![]() 和
和![]() 是差分后移算子的多项式:
是差分后移算子的多项式:
(4)(5)

引入增益模型:
(6)![]()
其中,![]()
引入卷积矩阵![]() 和汉克尔矩阵
和汉克尔矩阵![]() ,
,
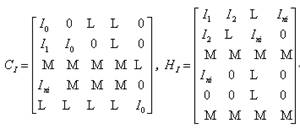
其中,![]()
所以根据![]() 和
和![]() 的定义式可以将式改写成:
的定义式可以将式改写成:
(7)
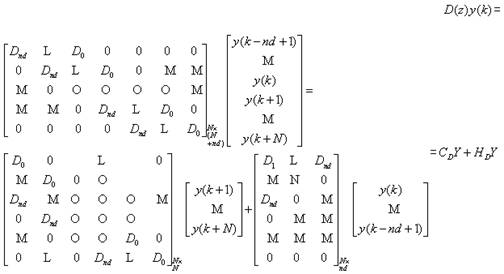
同理,式子右边也可以进行变换,最后得到:

PID参数设计
3.1广义预测模型描述
广义预测控制采用如下离散差分方程描述,也即CARIMA模型:
(12)![]()
使用如下的Diophantine方程

3.2PID和GPC的结合
PID控制的具体算法为:它根据给定值r(t)与实际输出值y(t)构成控制偏差,然后将偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对被控对象进行控制,如下式所示:

(23)
实验仿真及结果分析
选择一个仿真模型,如下:![]()
运用同样的参数,传统PID算法和改进的GPC-PID算法仿真结果如下图表示。其中,红色曲线代表传统PID算法,蓝色曲线代表改进的GPC-PID算法。
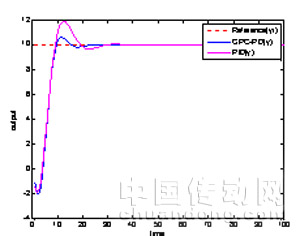
图1-控制输出
从图1中可以看出本文使用的GPC-PID预测算法比传统的PID控制器更加平滑,新的预测算法所需用的时间比传统算法更快达到稳定,基于Toeplitz的矩阵很好的展现了这一特性,节省了在线计算的时间,而传统算法则不具备这一优点。
|
方法 |
在线计算时间 |
|
传统PID算法 |
0.11068s |
|
本文方法 |
0.05749s |
表格1-计算时间比较
从这个表格中可以看出改进的GPC-PID算法所用时间更短,并且输出的波动明显降低。改进算法在线计算时间更短,很好的减少在线求解丟潘图方程的复杂程度,减轻了系统的负担。最后的曲线也更加平滑,达到了预期效果。
结语
PID控制技术是目前应用最广泛的控制技术,本课题在保证经典PID控制性能发挥其简单实用长处的基础上,根据滚动优化原理整定PID控制参数。所提出方法,避免了已有预测PID控制方法需要递推求解Diophantine方程的弱点,提高了预测PID算法的运行速度,从而也拓宽了算法的工程应用范围。