
1.引言
随着MEMS技术的快速发展,内窥镜技术已取得了重大的研究成果,特别是人体胃肠道无线胶囊内窥镜是医用电子内窥镜系统的一个重大突破[1-4]。围绕着胶囊式内窥镜,越来越多的研究正在展开。但是无线内窥镜胶囊也存在不少问题,2004年的欧洲技术报告中指出,运动与姿态控制功能的实现是需要首先解决的问题,包括运动控制和定位问题 [5],而为了保证在诊断治疗过程中运动和定位问题的有效性,对这些微型医疗胶囊在体内的空间位置进行实时的定位位置检测就显得极其重要了。在体内微型诊疗装置的定位技术方面,传统的方法一般都采用超声成像、核医学影像及荧光造型定位等技术[6],但是这些定位方法却存在着成本高、操作复杂,对人体容易造成辐射和无法满足长时间动态定位的缺点。许多学者对装置定位系统进行了的研究,提出了磁定位的简化模型及相应的动态跟踪技术[7-9]。
为了更好地满足永磁体用于体内微型胶囊准确定位测量的要求,在本文中作者设计了一种基于HMC1022和HMC1021三轴磁阻传感器模块,经两级放大电路放大后,由数据采集装置对胶囊空间磁场强度进行多点采集的定位系统。该系统采用了较以往更高灵敏度的磁阻传感器模块,合理的布置传感器模块组,具有更高检测灵敏度高和测量范围大的优点。
2.胶囊定位检测原理
磁感应定位是利用磁阻传感器的霍尔效应,即根据永磁体随着其磁矩方向和距离的变化在空间磁场形成特定规律的磁场分布。相应地,通过检测特定磁场参数的变化,我们就能够测量永磁体在空间位置的变化,并确定其在空间的具体位置[9]。
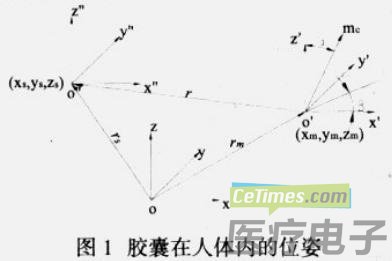
在人体内,胶囊可看作刚体。同时,为了磁阻传感器模块定位的需要,在胶囊内部放置圆柱永磁体。如图1所示,胶囊在空间的位姿可以由其内部任意点的位置以及胶囊内永磁体的磁矩方向与柱面坐标系所形成的两角表示,其中为胶囊中心点的坐标,为胶囊磁矩方向与柱坐标的夹角,空间原点坐标系。
当胶囊中圆柱永磁体的尺寸远小于其到磁传感器距离r时,永磁体可简化成一个磁偶极子,可以直接写出胶囊在磁阻传感器模块的磁感应强度[10]:

式中,mc为胶囊的磁矩矢量,rm(xm,ym,zm)为胶囊空间位置向量及坐标,rs(xs,ys,zs)为磁阻传感器模块位置向量及坐标,r=rs- rm=(X,Y,Z)=(xs-xm,ys-ym,zs-zm)为磁阻传感器模块相对于胶囊的位置向量。mc为胶囊磁矩的大小,其中(xs,ys,zs) 是布置在空间的三轴磁阻传感器模块的坐标,其坐标轴与全局坐标系重合。从式(1)可知坐标(xs,ys,zs)为已知量,再通过实验测量出各磁场分量 Bx,By,Bz,α,β此时如果要求解出五个未知量xm,ym,zm,,则至少两个三轴磁阻传感器模块才可以。
3.系统硬件设计
本系统硬件由4组三轴磁阻传感器模块(内置置位/复位电路)、放大电路和数据采集卡三部分组成。
3.1磁阻传感器模块
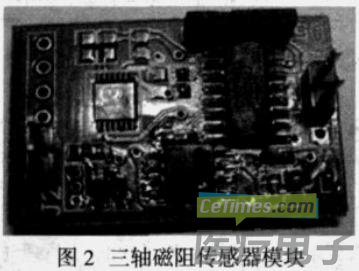
图 2所示为设计制作的由HMC1022和HMC1021互相垂直安装而构成的三轴磁阻传感器模块,内置置位/复位电路,用来测量胶囊内部条形磁铁在空间产生的磁感应强度,其中,HMC1022测量两个方向(x,y轴方向)(即公式(3)中的Bx,By),而HMC1021测量一个方向(z轴方向)的磁感应强度(即公式(3)中的Bz)。HMC1022和HMC1021分别为双轴和单轴磁阻传感器,它们除了测量磁感应强度的轴数不同外,具有相同的技术参数。 HMC1022和HMC1021内集成置位/复位带,可降低温度飘移效应、非线性误差和由于有高磁场的存在导致输出信号丢失的影响[11]。

3.2放大电路
随着距离的增加,永磁体磁场强度的分布衰减很快。鉴于上述永磁体磁场强度随距离的变化规律,在实验中,采用AD620这种典型的放大器件,在满足数据采集卡的分辨率精度大于磁阻传感器的输出分辨率精度的要求条件下,通过计算实验中选择了1000倍放大倍数。
3.3数据采集
采用PCI-1716数据采集卡将放大电路输出信号采集进入计算机处理分析。利用LABVIEW虚拟仪器图形化软件编程,实现采集模拟信号、A/D转换的功能。
4.实验步骤
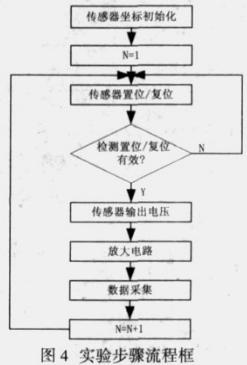
如图4所示为实验步骤流程框图。
实验采用如下程序进行:
(1)传感器坐标初始化实验时将4组三轴磁阻传感器模块的空间坐标固定,并记录下来(即公式(1)中的xs,ys,zs),以待采集完成后带入公式(1)处理求解计算用。
(2)在每次胶囊移动相应位置且固定后,记录下胶囊与各组磁阻传感器模块的位置距离,并通过磁阻传感器模块中集成的置位/复位电路来提高传感器的灵敏度。
(3)置位/复位后磁阻传感器模块输出有效的磁场强度电压,随后经过电压放大和采集,送入计算机进行分析处理,根据前述公式(1)计算出(xm,ym,zm,α,β),并与步骤(1)中实际记录距离进行对比分析。
5.实验及结果分析
在实验中,将4个磁阻传感器模块放置于正方体实验架(0.3mx0.3mx0.2m)的四个顶角,如图3所示,其初始坐标依次固定为:A(0,0,0),B(0.3,0,0),C(0.3,0.3,0),D(0,0.3,0)。在采集过程中,把胶囊磁矩方向调整和轴正向一致,在磁阻传感器模块布置平面内把胶囊从点(0.1,0.03,0)沿直线每隔3cm定位一次且逐步移动到点(0.1,0.27,0),4个磁阻传感器模块在每次定位后依次采集数据。如图5所示,磁阻传感器模块A测得的磁场强度不断下降,磁阻传感器模块B、C磁场强度变化趋势逐渐接近,磁阻传感器模块D测得的磁场强度缓慢上升。将实验数据和计算数据对照,发现两者误差在±10%范围内。说明本文设计的磁阻传感器模块组能够较准确地测出胶囊在运动过程中的磁感应强度。

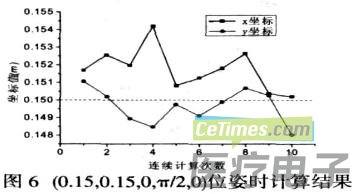
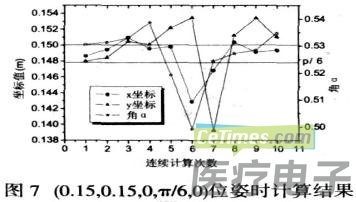
同时对于胶囊三个给定位姿状态,进行连续10次计算的结果。选择的位姿点为(0.15,0.15,0,π/2,0)和(0.15,0.15,0,π /6,0)。图6为位姿点(0.15,0.15,0,π/2,0)计算的结果,由图中可见,计算的坐标值x,y都在0.15上下波动,误差在±3%,而轴坐标值和两个角度值的计算结果都非常理想,没有标出。图7为位姿点(0.15,0.15,0,π/6,0)计算的结果,此时胶囊磁矩方向与轴角度为30。从图中坐标值波动情况来看,其误差扩大到了7%,而与轴夹角坐标误差为5%,另外两个参数的计算结果很理想。
上面的测量实验和计算结果表明,设计的定位检测系统能够较准确地测出胶囊在运动过程中的磁感应强度,从而准确的定位出胶囊的空间位置和方向。同时应当注意的是当胶囊在4组磁阻传感器模块测量区域中部时,其计算结果精度较高。
6.结论
在本文中,作者提出了一种研究该定位技术的新型实验系统,利用高灵敏度的磁阻传感器模块对微胶囊空间磁场强度进行感应采集。原理和实验都证明了可以通过检测永磁体空间磁场分布来实现对微型内窥镜胶囊的定位。通过对实验结果的分析证明,该定位系统对于胶囊在运动过程中的空间位置和方向的定位具有较高的准确率,可以有效应用于微型内窥镜胶囊在体内的定位,显著提高了临床疾病诊断的准确率。
本文作者创新点:采用了高灵敏度的三轴垂直磁阻传感器模块,并结合放大和采集电路对胶囊空间磁场强度进行检测,实现准确定位。此系统比以往有更大的准确检测范围,可达到20-30cm。
参考文献
[1]IddanG,MeronG,GlukhovskyA,etal.WirelessCapsuleEndoscopy.Nature.2000,405(6785):417
[2]http://www.microsystem.re.kr/
[3]http://www.cqjs.net/.
[4]http://www.rfnorika.com/
[5]DARIO.P,DILLMAN.R.EURON-TechologyRoadmaps.E.R.Rnetwork,Editor.April23,2004,pages:6-22.
[6]Golden,etal.Apparatusandmethodforlocatingamedicaltubeinthebodyofapatient.USpatent5622169.
[7]侯文生,郑小林,彭承琳,彭小燕,吴旭东.体内微型诊疗装置磁定位简化模型的实验研究.仪器仪表学报.2005,26(9):895-897.
[8]侯文生,郑小林,彭承琳,彭小燕,吴旭东.基于磁定位的消化道微型药物释放装置动态跟踪技术研究.北京生物医学工程.2005,24(1);36-38.
[9]徐凯.永磁同步电动机矢量控制中磁场定位的DSP实现.微计算机信息.2006,5(2):171-172.
[10]Fogel,L.,Owens,A.,Walsh,M.Artificialintelligencethroughsimulatedevolution.NewYork:Wiley,1966
[11]http://www.hollywell.com.