作 者:华北电力大学 控制与计算机工程学院 / 姜栋栋
1 引言
在工业控制领域中,单片机作为控制器件,其显著特点是高性能、高速度、低功耗、价格低,编程简单,但是其可靠性和搞干扰性比较弱,特别是在强电和恶劣的运行环境下,要保证可靠性和安全性,需要采取极为完善的搞干扰措施,这些都给工程的设计的难度和费用带来的负担。近年随着工业自动化控制的高要求以微电子、计算机、通信技术的发展示,可程编程逻辑控制器(plc)是作为一种专为工业环境下使用的数字运算操作的电子系统应运而生它是以嵌入式cpu为核心,加上其它所需的输入、输出扩展模块和通讯模块可取代传统气动或电气控制完成开关量的模拟量的顺序控制,按照逻辑条件进预先设计好的顺序动作,并按照逻辑关系进行故障保护动作的控制。将plc技术运用于现代串级调速技术,可明显改善调速的性能和减小全速和调速时故障的发生率。
2 现代串级调速的概述
现代串级调速技术是引入整流环节、斩波环节和逆变环节,通过调节斩波环节的占空比来改变逆变器两端电势的大小,因为此电势与转子侧电势串联并且电势 与转子侧的电势相反,所以改变了转子侧总电势的大小,进而改变了转子侧电流,最终改变了电机的转速。现代串级调速技术主要分为外反馈式和内反馈式,外所馈式主要工作原理是使用逆变变压器将转差功率吸收并回馈至电网,其原理如图1所示。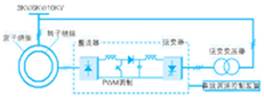
图1 外反馈式串级调速
内反馈式串级调速技术是在电动机定子绕组嵌槽中同槽嵌放一个反馈绕组,则定子铁芯中的反馈绕组和定子绕组构成并代替了逆变变压器,将转差功率通过反馈绕组及定子绕组吸收并回馈至电网,其原理如图2所示。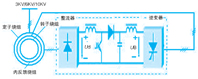
图2 内反馈式串级调速
3plc在内反馈串级调速系统中的应用
3.1 plc的选择
因plc具有编程简单、功能强、性价比高、硬件配套齐全,易用性强、可靠性高、搞干扰能力强和系统设计安装和调试工作量小的优点,所以将其应用于现代串级调速系统中具有明显的优势。由于串级控制系统的检测点以及控制量较多,是一个大规模的测控系统,因此此次选用西门子公司s7-200系列的cpu224作为系统的控制器。该plc具有14输入/10输出共24个数字量i/o点、可连接7个扩展模块、最大可扩展168路数字量i/o点以及兼容ppi,m pi和自由方式的通讯协议等优点,因此它是一个具有较强控制能力的控制器。
另外选用西门子公司的s7-200系列的cpu224ac/dc/继电器型plc,而没有选择晶体管输出,是因为继电器输出型有以下优点:
(1) 继电器输出型是隔离输出,即触点跟线圈不共地,只要外加线路电路不超过plc继电器的额定电流就可以了;晶体管输出就有点麻烦,除了要考虑电流问题外,还要考虑电压是直流的,地要接对,要考虑是npn还是pnp输出等问题。
(2) 继电器输出型是令cpu驱动继电器线圈,令触点吸合,使外部电源通过闭合的触点驱动外部负载,可带较大的外部负载;而晶体管输出型是令cpu通过光耦合使晶体管通断,以控制外部直流负载,可带外部负载小,有时候要加其他东西来带动大负载(如继电器,固态继电器等)。
3.2 基于plc的内反馈串级调速系统
基于plc内反馈串级调速系统原理如图3所示,此次设计的调速系统主要是采用plc控制去控制系统中的开关1km、2km、3km、4km和接入的水阻,在调速系统处于不同功能状态和用户要求时采取相应的动作,当启动电机时先让plc控制水阻电机让其缓慢增大到最大水阻值,然后合1km使电机启动,再让plc控制水阻电机使水阻缓慢减小到最小值,系统这样串入水阻是因为可以减小电机的大启动电流对系统的冲击,当水阻值达到最小时合1km将水阻短路进而使完成电机的启动阶段,当调速时再合4km和3km进入调速状态。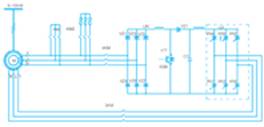
图3 基于plc的内反馈串级调速系统原理图
4 串级调速系统在全速状态下的故障处理
4.1 全速正常转停车过程中故障处理逻辑控制程序
串级调速控制系统的正常停车为就地或远方停车按钮或停车命令,或为故障时系统停车指令。在全速状态下,高压开关qf保持闭合状态,接触器2km处于断开状态,而接触器1km、3km、4km处于闭合状态,斩波器igbt的导通时间是整个周期,水阻的极板在最小位上。当按下就地设备上的停车按钮或从远方触摸屏发出停车命令时,控制器plc发出高压开关qf断开命令, 然后再检测qf的辅助触点是否是真的断开。如果经过一定的时间,这个qf断开信号没有返回到plc的输入端,则plc认为高压开关发生故障,发出报警信号,提醒工作人员现在设备发生故障需要检查设备,直至此故障被彻底的解决掉;如果qf的辅助触点断开,则这个断开信号将返回到plc的输入电路。plc会认为有全速转向停车的过程已经结束,发送命令使得停车状态指示灯亮起来。该故障处理流程如图4所示。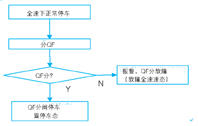
图4 全速正常转停车过程中故障处理流程
如图5中信号1为电容电压,信号2为4km返回。在进行保护时,4km分快于2km合。从图中可以看出,当某一时刻qf跳闸时,电容电压十分迅速的从70v降至0v。而接触器4km在qf跳闸后经过55ms左右后由闭合状态转换到断开状态。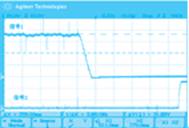
图5 qf跳闸故障波形图
4.2 全速态下紧急停车过程中故障处理逻辑控制程序
串级调速控制系统在全速状态下在某些特殊的情况下需要紧急停车。如图6 所示,在这种情况下,plc发出断开高压开关qf的命令。如果在一定时间内qf状态的返回信号没有送到plc的输入端,则plc会发出使得接触器4km断开的命令;如果这个qf断开信号送到了plc的输入端,这个系统在全速状态下紧急停车过程结束,发送命令使得停车状态指示灯亮起来。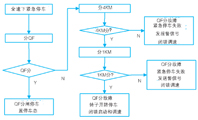
图6 全速下紧急停车过程故障处理流程
而plc发出断开接触器4km的信号,可以从图3的基于plc的内所馈串级调速系统原理图中得知,这相当于是把整流、斩波和逆变这三部分从系统中切除。让系统在全速、转子绕组开路或者转子绕组串水阻的方式运行。如果经过一定时间接触器4km的断开信号没有返回到plc的输入端,则plc会认为接触器4km也发生故障不能正常操作,在发报警信号的同时,闭锁系统进入调速状态的权限。
当接触器4km的断开信号送到plc的输入端后,plc发断开接触器1km的命令,既然高压开关都不能断开,但要想使电机停下来,也只有让电机处在转子绕组开路的状态。当接触器1km在一段时间内没有把断开信号返回到plc的输入端,系统也只能保持全速的工作状态,发出报警信号的同时,闭锁系统进入调速状态的权限。如果这个断开信号送到了plc的输入端,则电机按最坏的处境,保持在转子开路的状态下,当然这种情况下,电机是无奈的停止转动。plc在发出报警信号的同时,闭锁系统进入启动和调速状态的权限。
如图7所示 为逆变停止后停车的电压波形图。图中信号1为电容电压,信号2为4km返回。正常全速或故障转全速时,电容储能不为零,额定电压约70v,全速时电容电压约40v。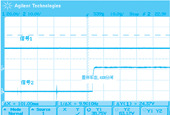
图7 全速停车过程波形图
5 结束语
本文充分考虑了内反馈串级调速系统的原理,采用西门子公司的plc组成串调的控制系统,充分利用了plc控制系统的全数字化,简单可靠,体积小,控制更加准确,搞干扰能力强等优点,并且通过流程图全面分析了电机在全速状态下可能出现的几种故障,通过仿真波形可以看出在plc控制系统中,当全速状态下某种异常情况发生时,控制系统都能够及时准确的采取相关的保护措施,由于全速状态是电机工作的一个重要状态,如果全速状态下的故障发生率能够得到有效的控制,那么对于维护整个调速系统的稳定性将是至关重要的。
作者简介
姜栋栋(1986-) 男 硕士研究生,研究方向为电力电子技术和电气拖动及自动化。
参考文献(略)
