
PID控制是最常的控制策略,在工业过程控制中90%以上的控制回路具有PID结构。PID控制之所以被广泛应用主要是因为它算法简单,在实际中容易被理解和实现,而且许多高级控制都以PID控制为基础。但是由于环境的变化,使被控对象具有时变性,参数经过一段时间以后会出现性能欠佳、适应性变差、控制效果下降等情况。因此,寻求参数自动整定技术,以适应复杂工况及高性能指标的控制要求,是实现节能优化控制的重要手段,具有重大的工程实践意义。
1 自整定过程原理
本文主要研究了一种手持式的PID参数整定仪器,此整定仪具有整定单变量和双变量的双重功能,控制系统主要采用低能耗的MSP430微控制器,软件部分采用的软件开发平台是IAR MSP430 V3.42A。
PID参数整定仪的实现不仅能够简化过程控制工程师的工作量,而且能够改善整个PID控制领域的控制性能,在能源日益紧张的今天,对于节约能源起到非常重大的作用。自整定过程如图1所示。其中过程1与过程2是两个具有耦合的过程。
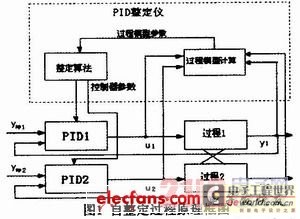
具体过程为:整定仪提取过程的输入输出信号,然后通过过程模型计算部分计算出过程模型,将过程模型参数送给整定仪的算法整定部分,根据过程模型参数如果判断系统为单变量系统则采用幅值相位裕度法对其进行整定,如果为双变量则采用RGA失调因子法对其进行整定,最后将整定的结果显示在LCD显示屏上。
关键字:MSP430单片机 PID参数整定义
本文研制的便携式PID参数整定仪主要具备如下功能:
(1)模拟信号输入。能够采样接入标准的4~20mA电流信号,方便信号的处理。今后在此基础上可以进行扩展,从而使其能够接收更多的标准信号。
(2)模型辨识部分。设系统模型为二阶加滞后模型,采用基于频域的模型便是算法辨识出系统模型。
(3)PID参数的计算。根据辨识的模型,运用幅值相位裕度法与RGA失调因子法完成。
对PID控制器的自整定算法;其中幅值相位裕度法整定公式为:
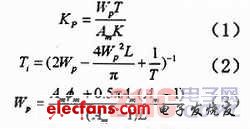
其中T为时间常数,Am为幅值裕度,φm为相位裕度。通常情况下一般取Am≥2,φm=30~60°。
RGA失调因子法整定公式为:

(4)人机交互接口。能通过键盘进行参数的设置、修改,并且能够将实时信息以及整定的结果等通过LCD显示。
这些功能组合构成了便携式的PID参数自整定器。
3 PID参数整定仪的硬件电路设计
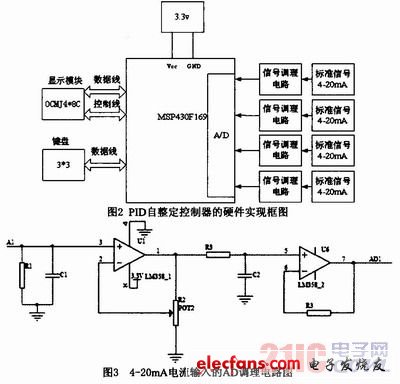
多变量便携式PID参数整定仪由于其可以随身携带,所以我们采用3.3V电池对其供电。这就要求装置尽量保持低功耗以延长电池寿命,MSP430单片机正是由于其低功耗而被广泛采用,因此选择MSP430F169作为PID参数整定仪的控制器。
MSP430F169具体特性如下:
(1)低工作电压范围:1.8~3.6V;
(2)超低功耗,五种省电模式;
(3)从待机模式唤醒6μs;
(4)3通道DMA,12-Bit A/D转换器,双12-Bit D/A同步转换器;
(5)串行通讯接口(USART0),功能如异步UART或同步SPI或I2C;
(6)串行通讯接口(USART1),功能如异步UART或同步SPI;
(7)具有可编程电平检测的供电电压管理器/监控器;
(8)串行在线编程,无需外部编程电压,可编程的安全熔丝代码保护;
(9)MSP430F169.60KB+256B Flash Memory,2KBRAM;
本整定仪适用于任何过程而不用管其暂态类型。根据PID参数整定原理和功能,系统的硬件框图如图2所示,图3给出了4~20mA电流输入的AD调理电路图。
关键字:MSP430单片机 PID参数整定义
4 PID参数整定仪的软件设计
4.1 PID参数整定仪主要程序模块
在工程实际应用中,不仅需要完成硬件的相关设计与测试,还必须根据需要进行软件的设计和调试工作,所以在设计出符合要求的硬件电路的基础上,还要进行软件系统的设计和调试。本控制器软件部分主要包括以下程序模块。
(1)系统的初始程序模块。用来进行系统的初始化,包括设定初始状态值和参数,确定A/D初始工作参数,检测主电路是否上电和是否允许系统启动运行等等。
(2)键盘扫描程序模块。读取键盘输入值,包括PID初始设定值、系统设定值及采样时间等等。
(3)采样程序模块。用来对信号进行采样,采样过程要进行滤波,减少噪声干扰对采样数据的影响,最后检测采集的数据是否包含了对象足够多的信息,清除不合格的采样数据,保证所采样数据的质量。
(4)模型辨识模块。根据采样数据采用相关系数辨识法辨识出系统的数学模型,使辨识的模型与原模型有较好的线性相关度。
(5)参数整定模块。根据辨识出的系统模型采用相关的整定算法计算出新的PID参数值。
(6)LCD模块。将相关的数据,像设定值、整定模式以及PID的参数值等,显示在液晶屏上。
整个系统的程序结构框图如图4所示。
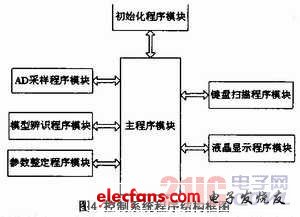
上面模块还要进行详细划分,每个模块之间的耦合很少,这样就可以独立编程、调试,提高了软件开发的模块性。
4.2 PID参数整定仪的总体工作流程
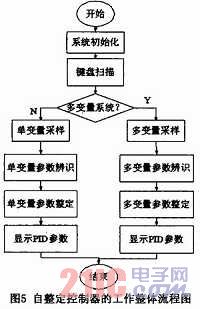
图5是自整定控制器的工作流程图,用户输入设定值,然后对过程的输入量u和输出量y进行采样。对采样的数据进行处理,并计算出最佳的PID参数整定值。整定具体过程如下:
(1)通过控制面板设定采样时间及设定值以进行采样。
(2)将采集的数据处理后得到辨识所需要的10~20个点。
(3)运用基于频域的模型辨识算法对系统进行辨识,得到系统的模型。
(4)根据模型采用相应的辨识算法计算PID参数值。
(5)在LCD上显示新的PID参数。
5 小结
介绍了本参数整定仪的各功能模块,并且进行了硬件及软件设计。此整定仪集单变量和双变量整定功能于一身,适合于任何使用PID控制器的场合,不过只有在过程获得平衡状态时辨识方法才可使用。此整定仪整定出的PID参数在LCD上显示。工作人员只需将整定出的新参数在系统中进行设置。此过程简单实用,方便工作人员操作,并且由于设计小巧,便于工作人员随身携带。