
引言
现场总线是当今自动化领域技术发展的一个热点,被誉为自动化领域的计算机局域网。它的出现,标志着工业控制技术领域又一个新时代的开始,并对该领域的发展产生了重要的影响。控制器局域网CAN(Controller Aera Network)属于现场总线的范畴,CAN总线的数据通信具有极高的可靠性、实时性和灵活性的特点,是一种有效支持集散控制系统和实时控制的多主串行总线。
1. 基于CAN总线的集散控制系统
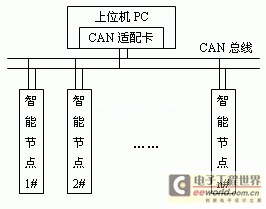
基于CAN总线的集散控制系统如图1所示,采用现场总线式控制系统FCS(Fieldbus Control System)结构,由上位机、CAN总线控制网络、CAN智能节点组成。上位机主要完成在线系统监控,上位机通过CAN适配卡与CAN总线相连;CAN智能节点完成数据采集及计算、节点设定、节点控制、运行显示等。上位机和智能节点之间通过CAN现场总线交换各种数据和管理控制信息。
2. CAN的性能特点
CAN为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从,通讯方式灵活,且无需站地址等节点信息。
CAN网络上的节点信息分成不同的优先级,可满足不同的实时要求,高优先级的数据最多可在134μs内得到传输。
CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动的退出发送,而优先级较高的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。
CAN只需要通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无需专门的“调度”。
CAN的直接通信距离最远可达10km(速率5kbps以下);通信速率最高可达1Mbps(此时通信距离最长为40m)。
CAN上的节点数主要取决于总线驱动电路,目前可达110个,报文标识符可达2032种(CAN2.0A),而扩展标准(CAN2.0B)的报文标识符几乎不受限制。
CAN采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果。
CAN的每帧信息都有CRC校验及其他检错措施,保证了数据出错率极低。
CAN通信介质可为双绞线、同轴电缆或光纤,选择灵活。
CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响。
3. CAN智能节点硬件设计
目前常用的CAN器件分为两大类,一类是独立的CAN控制器,如Philips的PCA82C250、SJA1000等,另一类是带有CAN功能的微控制器,如PIC的DSPIC6014、TI的TMS320F2812、Motorola的MC9S12DT128等等。本文采用Intel的 87C196KD微处理器和PHILIP的 SJA1000 CAN控制器完成CAN总线智能节点的设计。
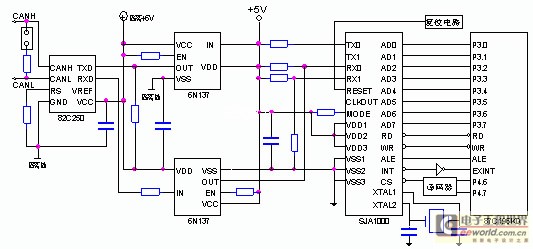
图2 CAN智能节点硬件电路
CAN智能节点硬件电路如图2所示。电路主要由五部分组成:微控制器87C196KD、独立CAN控制器SJA1000、CAN总线收发器82C250、高速光电耦合器6N137、复位电路。
微控制器87C196KD是CAN智能节点的核心部分,87C196KD具有32K字节的ROM和1000字节的RAM,可用高级语言编程。87C196KD主要完成节点数据采集及计算、节点设定、节点控制、运行显示等功能,并与CAN控制器SJA1000之间发送、接收数据。
SJA1000芯片是一种应用广泛、性能优异的CAN总线控制器。SJA1000负责完成CAN总线通信协议的物理层和数据链路层的功能。它有Basicmode和Pelimode两种工作模式,与 Basicmode模式相比,Pelimode工作模式支持扩展帧,报文标识符可达29位,提供了更加强大的功能。为减少每帧非数据字符的数量,提高信息交换速度,在实际应用中宜采用Basicmode模式。在Basicmode模式下,SJA1000对于微处理器来说相当于一个存储器映像外围设备,它的可寻址域由控制段和接收、发送缓冲器组成。SJA1000的AD0~AD7连接到87C196KD的P3口(数据总线),采用并口连接方式,数据读写速度快。87C196KD 地址总线的P4.6、P4.7通过译码器与SJA1000的片选信号CS相连,SJA1000的RD、WR、ALE分别与87C196KD的RD、WR、ALE相连, SJA1000的INT经过非门与87C196KD的EXINT相连, 微控制器也可以通过中断的方式访问CAN控制器。
82C250是CAN控制器与物理总线之间的接口。82C250的CANL和CANH与CAN总线相连,若82C250处于CAN总线的网络终端,CANL和CANH之间需加一个匹配电阻,用于消除反射信号的干扰。RS用于选择三种不同的工作方式:高速、斜率控制和待机,RS串接一个电阻后再接地,用于控制上升和下降斜率,减小射频干扰。
为了进一步提高系统抗干扰能力,在CAN控制器SJA1000和CAN总线收发器82C250之间加接高速光电耦合器6N137,并采用DC-DC变换器隔离电源,这样就很好的实现了总线上各个CAN节点之间的器隔离。
复位电路由看门狗MAX706和手动复位按扭组成。当系统发生故障时,MAX706自动产生复位信号给87C196KD和SJA1000复位,若想重新启动程序,可用手动复位按扭复位。
4. CAN智能节点软件设计
CAN智能节点的软件设计主要包括三部分:CAN初始化程序、报文发送程序、报文接收程序。下面给出了Basic CAN模式CAN智能节点软件的程序框图和C语言源程序。
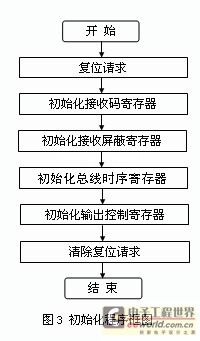
a.CAN初始化部分
#include <80c196kd.h>
/* 应包含的微控制器寄存器的定义*/
#include _SFR_H_
#include _FUNCS_H_
#define BASE_CAN 0Xa000 /*定义CAN控制器基址*/
typedef struct {
unsigned int id; /*报文标识符*/
unsigned char rtr; /*远程帧位*/
unsigned char dlen; /*数据长度*/
unsigned char data[8]; /*数据*/
} MSG_STRUCT; /*将CAN协议的帧用C语言的结构表示*/
void init_can()
{
*(unsigned char*)(BASE_CAN + 0) = 0x01; /*SJA1000进入复位状态*/
*(unsigned char*)(BASE_CAN + 4) = 0x00; /* 初始化接收代码寄存器ACR */
*(unsigned char*)(BASE_CAN + 5) = 0xff; /* 初始化接收屏蔽寄存器AMR */
*(unsigned char*)(BASE_CAN + 6) = 0x00; /* 初始化总线时序寄存器BTR0 */
*(unsigned char*)(BASE_CAN + 7) = 0x14; /* 初始化总线时序寄存器BTR1 */
*(unsigned char*)(BASE_CAN + 8) = 0xfa; /* 初始化输出控制寄存器OCR */
}
b.报文发送部分
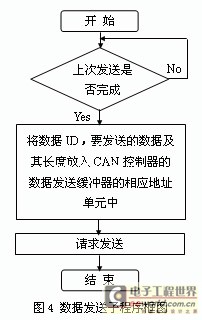
unsigned char can_send(MSG_STRUCT smsg)
{
unsigned char v;
int i;
v=*(unsigned char*)(BASE_CAN + 2);
if( v &0x08) /*判断是否可以发送数据*/
{ v=smsg.id>>3; /*标识符送识别码寄存器*/
*(unsigned char*)(BASE_CAN + 10) = v;
v=*(unsigned char*)(BASE_CAN + 10);
v=smsg.id & 7; /*识别码0-2位、RTR、DLC*/
v<<=5;
v+=smsg.dlen;
*(unsigned char*)(BASE_CAN + 11) = v;
for(i=0;i
{ *(unsigned char*)(BASE_CAN + 12+i) = smsg.data[i]; }
*(unsigned char*)(BASE_CAN + 1) = 0x01;
return(1);
}
else
{ return(0);}
}
c.报文接收部分
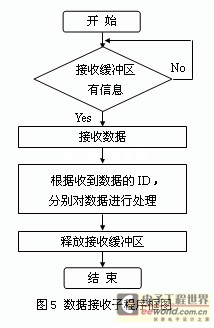
unsigned char can_receive()
{
MSG_STRUCT rmsg;
int i;
unsigned char buf1,buf2;
while((*(unsigned char*)(BASE_CAN + 2)) & 0x01)/*判断是否有可接收信息*/
{buf1 = *(unsigned char*)(BASE_CAN + 20); /*将一帧信息取出*/
buf2 = *(unsigned char*)(BASE_CAN + 21);
rmsg.dlen = buf2 & 0x0f; /*数据长度*/
for(i=0; i< rmsg.dlen; i++) /*取出数据*/
{rmsg.data[i]=*(unsigned char*)(BASE_CAN + 22 + i); }
*(unsigned char*)(BASE_CAN + 1) = 0x04; /*释放接收缓冲器*/
rmsg.rtr = (buf2 >> 4) & 0x01; /*远程帧*/
rmsg.id = buf1; /*取出报文标识符*/
rmsg.id <<= 3;
rmsg.id |= (buf2 >> 5) & 0x06;
switch (rmsg.id) /*按标识符转入不同的数据处理程序*/
case ……
{……
……}
break;
case ……
}
}
5. 结束语
本文的创新点在于:将现场总线引入到集散控制系统中,克服了传统的串行通讯集散控制系统的实时性不强,通讯可靠性差的问题。所给出的CAN智能节点已应用于某发电厂的集散控制系统中,经过一年多的运行情况发现该设计方案具有较好的可靠性、实时性和灵活性。CAN智能节点不仅可以应用于集散控制系统,还可以用于其它分布式控制系统。