
1 引言
微加速度计是MEMS(Micro Electromeclaanical System)的一个重要分支,在航空航天、汽车、国防等领域有着广泛应用。高g值加速度传感器作为一次仪表被广泛应用于撞击及高速运动过程中高过载测量,在深侵彻武器设计中,它可用于识别目标,也可用于测量飞机抗坠毁实验中和汽车碰撞试验中的过载川。高g值加速度传感器灵敏度系数的精度直接影响测量精度。由于高g值加速度传感器在很多场合都可以重复使用,在使用过程中,由于所承受高过载作用,其灵敏度系数可能发生变化,需经常校准。因此高g值加速度传感器灵敏度的测量不仅在研制高g值加速度传感器中扮演着重要角色,而且在抗高过载测量中起着重要作用。主要介绍微型霍普金森(Hopkinson)杆技术,采用激光多普勒原理,用衍射光栅做合作目标,使用调频信号的一种数字化解调方法实现多普勒频移数据处理,时间分辨率为一个采样间隔。该技术具有鲁棒性好、过程收敛、结果精确等特点。应用滑动最小二乘拟合直线段的方法实现微分运算,获得冲击速度和加速度的瞬时测量值,并给出实验结果。
2 加速度传感器校准装置及工作过程
图1为高g值加速度冲击传感器校准装置,是由Hop-kinson杆、差动式激光多普勒干涉仪、数字示波器和计算机系统组成。
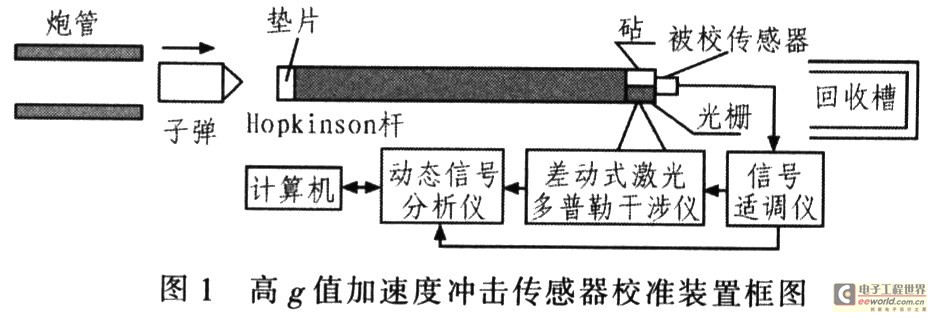
霍普金森(Hopkinson)激光干涉冲击试验台是加速度传感器冲击标准专用差动激光多普勒测速仪和小型空气炮加载系统,主要用于高g值测量,使用 Hopkinson棒,在杆中产生应力波,在距离端面几倍棒直径处,应力波的波振面实际上变成平面波,只要棒的长度与直径之比充分大,用Hop- kinson冲击机,在校准端面可获得波形良好及横向运动很小的冲击过程。差动式激光多普勒测速仪是测量通过激光探头示踪粒子的多普勒信号,再根据速度与多普勒频率的关系得到速度。由于是激光测量,对于流场没有干扰.测速范围宽,而且由于多普勒频率与速度是线性关系。和该点的温度、压力没有关系,是目前世界上速度测量精度最高的仪器,其工作过程如图1所示,使用Hopkinson冲击机对Hopkinson棒发射弹体,产生冲击加速度,同时作用于光栅和被测加速度传感器,被测加速度传感器测得的信号经信号适调仪后被动态信号分析仪采集,光栅位移经多普勒激光干涉仪产生具有多普勒效应的调频信号,该信号被数字示波器采集,对该调频信号进行频率解调后,可获得作用于加速度传感器的加速度值。
3 高g值冲击加速度传感器校准原理
激光多普勒一次冲击校准法采用激光多普勒原理,用衍射光栅做合作目标,绝对复现冲击加速度量值,并校准加速度计。反射式衍射光栅产生的多普勒频移为:
![]()
式中,ψ为入射角,θ为衍射角,v为光栅平面的速度,λ为激光波长。
双入射光光栅产生的多普勒频移为:

式中,ψ为入射角,v为光栅平面速度,λ为激光波长。
根据式(2)得到冲击速度v(t):
![]()
将式(3)微分得到冲击加速度a(t):

式(4)取峰值得到冲击加速度峰值aP。绝对复现的冲击加速度峰值ap作为参考量值,与被校加速度计输出的电量峰值VP作比较,得被校加速度计的冲击校准灵敏度:

另外,利用多普勒信号测得的速度改变量和加速度计输出波形所包络的面积也可确定被校加速度计的灵敏度。该灵敏度定义为:
式中,Us为加速度计的输出电压;a为加速度;g为标准重力对于碰撞过程,仅在t1-t2时间内存在加速度,也就是说在t1-t2时间内加速度计的运动速度从0增加到u,则式(6)可改写为:

式(6)两边除以A得到:
式中,
则时间间隔t1-t2内加速度计的平均灵敏度为:

由式(8)可看出:要确定Se需要测得 由式(6)可知
由式(6)可知![]() 可由对被校准加速度计的输出进行积分得到,而
可由对被校准加速度计的输出进行积分得到,而![]() 则是由激光多普勒信号解析得到的速度。
则是由激光多普勒信号解析得到的速度。
4 实验数据及结果处理
对ENDEVCO公司生产的2225,2225M5A型、PCB公司生产的356820型加速度传感器进行灵敏度测试试验。试验结果如表1所示。
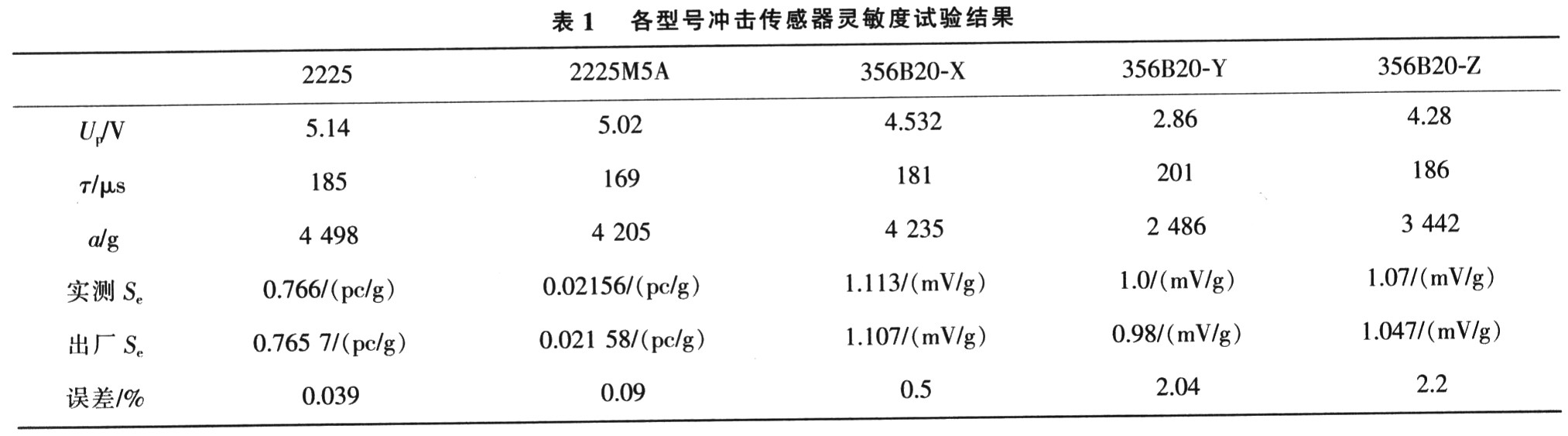
使用2225型冲击传感器和IM133电荷放大器做试验得图2~图5的曲线波形。被测传感器经电荷发生器归一化处理,输出刻度为1 mV/g。图2为实际试验获得的冲击过程中激光多普勒干涉信号,选择多普勒信号的开始点,去掉开始部分的不正常信号。该冲击校准装置中,滤波截止频率= 54 kHz,激光波长K=0.632 99 μm;激光干涉中使用二级衍射条纹,p=2;q=-2;光栅栅距d=1/150 mm。冲击过程中的激光多普勒干涉信号经计算,可得到冲击速度曲线,由式(3)获得图3所示的冲击速度波形曲线,最大速度v=5.33 m/s;由式(4)获得图4所示冲击加速度波形曲线,其峰值加速度g=4 497.533 7 m/s2,脉宽T=185μs,图5为冲击过程中加速度传感器输出波形曲线,截取有用信号,从该图可得其峰值VP=5.13 V,由式(6)可得被校加速度传感器的冲击校准灵敏度Sch=1.14 mv/g。由式(8)可得被测加速度传感器的平均灵敏度:Se=0.766 pc/g。
Hopkinson杆是校准高g值加速度传感器很好的实验装置,通过差动式激光多普勒测速仪,可以对冲击传感器在高g值段进行灵敏度校准实验。 ENDEVCO的2225、2225M5A型冲击传感器的灵敏度吻合较好,与各冲击传感器出厂灵敏度相比,误差小于0.1%,356820型传感器是3轴向冲击传感器,X轴的误差较小而另外两个轴向灵敏度误差偏大。
5 结论
本文所使用的冲击加速度校准方法,是目前原理最完善、最可靠的激光多普勒冲击校准方法,实现了绝对复现冲击加速度量值,采用光栅差动式激光干涉仪,实现冲击加速度的精确测量。为高g值加速度传感器的反复使用提供一种比较准确的参考标准。