
X5045是一种集看门狗、电压监控和串行EEPROM 三种功能于一身的可编程控制电路.特别适合应用在需要少量存储器,并对电路板空间需求较高场合,
X5045具有电压监控功能,可以保护系统免受低电压的影响,当电源电压降到允许范围(4.2V)以下时,系统将复位,直到电源电压返回到稳定值为止。X5045的存储器与CPU 通过串行通信方式接口(SPI),可以存放512个字节数据.可擦写100万次,数据可保存100年.
下图是X5045与具有手动复位的8051微控制器的连接
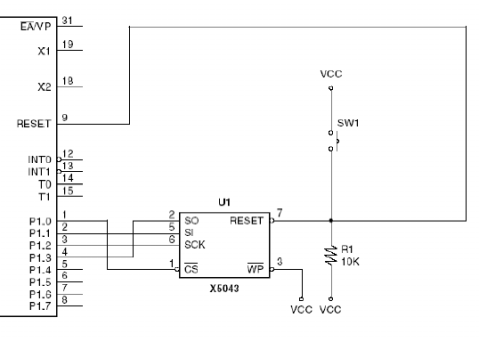
注意:图上的芯片写着是X5043,实际上这是X5045的接法
下边是51读写x5045存储器的程序
//x5045和51的连接方法
sbit CS = P1^0;
sbit SO = P1^3;
sbit SI = P1^1;
sbit SCK = P1^2;
//定义寄存器指令
#define WREN 0x06 // 写入使能指令(WREN)
#define WRDI 0x04 // 写入禁止指令(WRDI)
#define WRSR 0x01 // 写入状态寄存器指令(WRSR)
#define RDSR 0x05 // 读取状态寄存器指令(RDSR)
#define WRITE 0x02 // 写入存储器指令(WRITE)
#define READ 0x03 // 读取存储器指令(READ)
#define STATUS_REG 0x00 // 要写入到状态寄存器的值
#define MAX_POLL 0x99 // 最在查询次数m number of
void outbyte(unsigned char write_data)
{
unsigned char i;
for(i = 0; i < 8; i++)
{
SCK = 0;
SI = (bit)(write_data & 0x80); //传送一个位到SI
write_data <<= 1;
SCK = 1;
}
SI = 0;
}
unsigned char inbyte()
{
unsigned char i;
unsigned char read_data=0;
for(i = 0; i < 8; i++)
{
SCK = 0;
read_data <<= 1;
SCK = 1;
read_data |= (unsigned char)SO;
}
return read_data;
}
void wren_cmd()
{
CS = 0;
outbyt(WREN); // 传送写入使能指令
CS = 1;
}
void wrdi_cmd()
{
CS = 0;
outbyt(WRDI); // 传送写入禁止指令
CS = 1;
}
unsigned char rdsr_cmd()
{
unsigned char status;
CS = 0;
outbyt(RDSR); // 传送状态寄存器读取指令
status = inbyt(); // 读取状态寄存
CS = 1;
return status;
}
void wip_poll()
{
unsigned char i; // 设置最大的查询次数
//// 如果WIP位为'1'并且未达到最大查询次数, 则继续查询
//// 如果WIP位为'0', 则写入周期完成, 返回
for(i = 0; i < MAX_POLL; i++)
{
if(rdsr_cmd() & 0x01) // 读取状态寄存器
{
continue;
}
return;
}
}
void wrsr_cmd()
{
CS = 0;
outbyt(WRSR); // 传送状态寄存器写入指令
outbyt(STATUS_REG); // 传送要写入的数据
CS = 1;
wip_poll(); // 检测写入进度
}
void byte_write(unsigned int addr,unsigned char dat)
{
wren_cmd();
CS = 0;
if(addr & 0x100)
outbyt(WRITE | 0x08); //传送写入指令和地址最高位"1"
else
outbyt(WRITE); // 传送写入指令和地址最高位"0"
outbyt(addr); // 传送地址低字节
outbyt(dat); // 传送数据字节
CS = 1;
wip_poll(); // 检测写入进度
}
unsigned char byte_read(unsigned int addr)
{
unsigned char read_data;
CS = 0;
if(addr & 0x100)
outbyt(READ | 0x08);// 传送读取指令和地址最高位"1"
else
outbyt(READ); // 传送读取指令和地址最高位"0"
outbyt(addr); // 传送地址低字节
read_data = inbyt(); // 读取字节
CS = 1;
return read_data;
}
void rst_wdog()
{
CS = 0;
_nop_();_nop_();
CS = 1;
}
void init_serialcomm(void)
{ TMOD = 0x21; // 定时器1工作于8位自动重载模式, 用于产生波特率
// 定时器0工作于16位模式, 用于定时
TH1 = 0xFD; // 波特率9600
TL1 = 0xFD;
SCON = 0x50; // 设定串行口工作方式
PCON &= 0xef; // 波特率不倍增
TR1 = 1; // 启动定时器1
}
void send_char_com(unsigned char ch)
{ //向串口发送一个字符
SBUF=ch;
while(!TI);
TI=0;
}
void main(void)
{
unsigned char Temp,tdat;
init_serialcomm();
while(1)
{
//这里演示读出和写入 EEPROM
for (Temp=0; Temp<250; Temp++) byte_write(Temp,Temp);
delay(200);
for (Temp=0; Temp<250; Temp++)
{ tdat= byte_read(Temp); send_char_com(tdat);}
}