
1 引 言
Matlab" title="Matlab">Matlab具有强大的分析、计算和可视化功能, 利用MATLAB 提供的专业工具箱, 可以方便、灵活地实现对自动控制、信号处理、通信系统等算法的分析和仿真, 是算法设计人员和工程技术人员不可缺少的软件工具。
数字信号处理器( DSP" title="DSP">DSP)作为一种可编程专用芯片, 是数字信号处理理论实用化的重要工具, 在自动控制、语言处理、图像处理等技术领域得到了广泛应用。但对于算法设计人员来讲, 利用汇编语言和C语言进行功能开发, 具有周期长、效率低的缺点, 不利于算法验证和产品的快速开发。
由MathWorks公司和TI公司联合开发的MATLAB L ink for CCS" title="CCS">CCS DevelopmentToo l(CCSlink)是MATLAB6. 5版本中增加的一个全新的工具箱, 它提供了MATLAB、CCS和DSP目标板的接口, 利用此工具可以像操作MATLAB 变量一样来操作DSP器件的寄存器和存储器, 极大的提高了DSP应用系统的开发进展。
2 M atlab与CCS及目标板间的连接
Matlab可通过3种方式与CCS、目标DSP进行连接、数据交换。CCSL ink 向用户提供了3 种连接对象, 如图1所示。
CCS IDE的连接对象: 该对象支持TI的C2000 /5000 /6000系列DSP, 利用此对象可创建CCS IDE和M atlab的连接。用户可以编写用于DSP程序的Ma tlab语言批处理脚本, 从Matlab 的命令窗中直接运行CCS IDE中的应用程序, 向硬件DSP的存储器或寄存器发送或取出数据, 检查DSP的状态, 停止或启动程序在DSP中的运行。
与RTDX(实时数据交换)的连接对象: 该对象提供Matlab和硬件DSP之间的实时通信通道。它允许用户在主机和目标板之间进行实时的数据交换而不用考虑目标板程序的运行。RTDX连接对象实际上是CCS连接对象的一个子类, 在创建CCS连接对象的同时创建RTDX 连接对象, 它们不能分别创建。
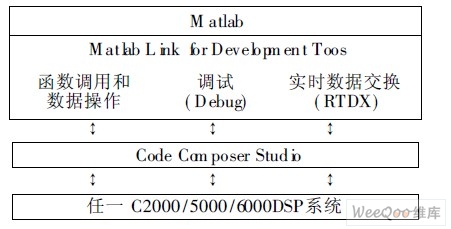
图1 CCSL ink的三种接口
嵌入式对象: 在Matlab 环境中创建, 该对象可以代表嵌入在目标C 程序中的变量, 由其直接对嵌入在目标DSP存储器/寄存器中的变量进行操作。
3 ETT IC2000环境
由以上所述可知, CCSLink为T IDSP实时应用开发的调试和测试提供了强大的支持, 而ETT IC2000则为T IC2000 DSP实时应用开发的整个过程(概念设计、算法仿真、原代码编写、目标代码生成、调试和测试)都提供了支持。利用ETTIC2000能够从S imulink模型自动生成T I C2000 DSP的可执行代码, 从而在Simu link统一环境下就可以实现整个硬件的在线仿真。
应用ETTIC2000开发实时DSP处理的过程如下:
( 1)概念构思和DSP处理算法设计;( 2)在S imulink环境下, 利用DSP BLOCKSET,FIXED_POINT BLOCKSET, C2000 DSPLIB 和Simulink等库中模块构建算法模型, 并在S imulink环境下运行仿真;( 3)如果仿真效果满意, 就可以在模型中加入所需的C2800 DSP Ch ip Support中的模块。
( 4)设置REAL - T IME WORKSHOP中编译连接( BU ILD)选项。
( 5)利用CCS中的调试工具、CCSLink或RTDX来调试目标DSP中的程序。
4 仿真系统的建立及代码生成
4. 1 ADC 转换及F IR滤波器处理程序设计
用Embedded target for T I C2000 工具包设计ADC 转换及F IR 滤波。在新建的S imulink文件中,放入C2000 Target Preference中的F2812 eZdsp, 并对其中参数进行设置。
实现A /D 转换的功能模块是C28x ADC, A /D转换模块可以选择模块A、B 中的任意六个通道, 这里要注意数据格式的转化。
FIR 滤波器设计有很多种, 利用M atlab 中的FDATooo l( F ilter Desiign&Analysis Too l)来设计是经常使用的一种。FDATooo l是通过指定滤波器的性能指标来快速设计F IR 或者IIR 滤波器, 它是一种图形设计界面, 如图2所示。
指定FIR滤波器为低通滤波器( Low pass) , 指定采样频率为6kH z, 低通频率为1kH z, 截止频率为2kHz, 菜单Analysis用来选择不同的分析显示方式,如幅度响应、相位响应、脉冲响应、阶跃响应、滤波系数等。指定完成设计参数后单击Overw rite generated filter b lock, 完成滤波器的设计。
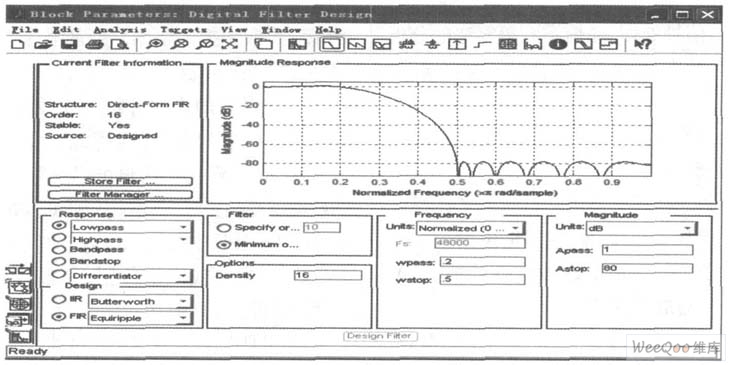
图2 数字滤波器设置对话框
4. 2 扩展卡尔曼滤波器的设计
扩展卡尔曼滤波器是通过内嵌S 函数完成的。
在RTW 中一般可以直接应用非内嵌C MEX S 函数, 但是在实时情况下对时间要求比较严格, 而非内嵌S函数的S imstruct数据结构需要大量的存储计算资源, 运行时调用S函数需要很大的系统开支, 此时就需利用TLC 技术将S 函数内嵌。TLC 是RTW的一个内部组成部分, 利用它可以自定义从S imulink模型生成的C 代码, 并为S imulink模型图生成优化的内嵌程序代码。通过自定义, 可以将自定义算法和现存的例程结合起来形成一个整体式的程序, 提高代码质量, 减少代码体积。
内嵌S函数的实现是通过生成一个TLC 文件mymode.l t lc完成的。当TLC 在阅读mymode.l rtw时, 如果发现有S函数block, 并且在TLC 文件的搜索路径中有相应的TLC 文件, 则S函数被内嵌。
4. 3 代码生成
以上完成了仿真模型各个模块的建立, 如图3所示。
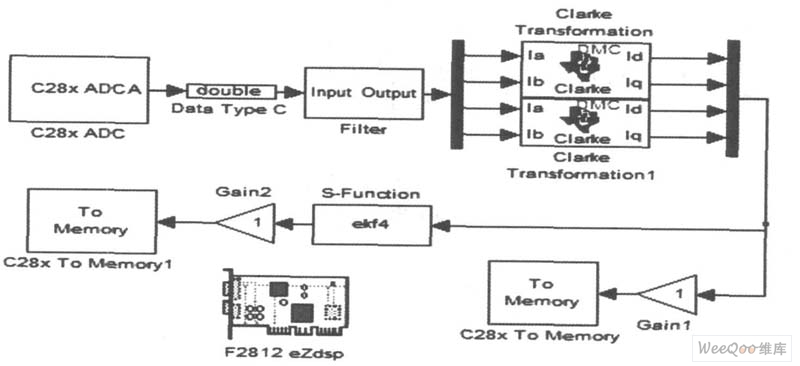
图3 仿真系统图
其中, 电压和电流的C larke Transformation 模块和C28x To Memory 模块是C28x DMC Library 和C2800 DSP Core Support中自带的模型, 在使用时只需要拖入仿真系统即可。
进入Simulink 的Conf iguration Parameters 对话框, 对Real- T im eW orkshop进行设置完成后, 点击Bu ild即可生成对应的DSP工程文件, 并且DDSL ink自动打开CCS, 进行编译调试, 如图4所示。
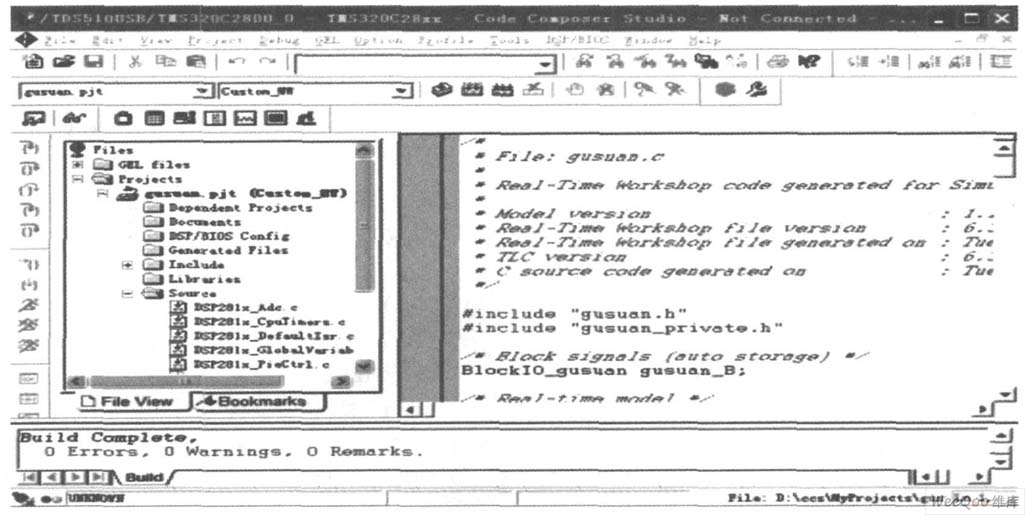
图4 CCSL ink自动调试DSP代码
由Mat lab自动生成的DSP代码能够实现AD转换、数字滤波及卡尔曼滤波计算, 但是由于程序中使用了很多缺省设置, 在运行中还有一些问题, 如中断处理程序只对定时器中断进行处理, 无法用图形方式观测变量值等, 需要进一步完善。
5 试验结果及分析
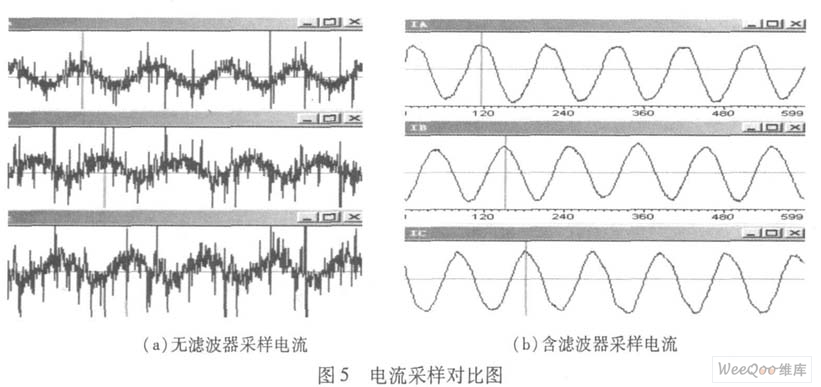
把修改完善后的代码加载到DSP实验板上, 对电机的电压和电流进行采样, 通过图5可以验证滤波器的效果。
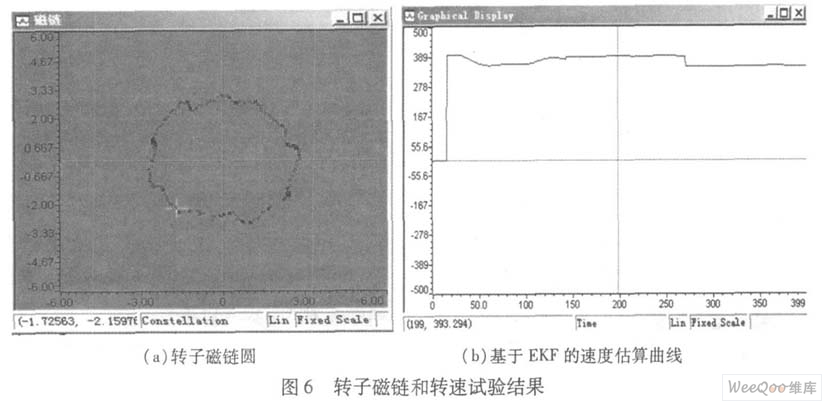
在利用扩展卡尔曼滤波进行速度估算时, 以异步电机在两相静止坐标系下的电流Ia、Iβ、转子磁链Φa、Φβ、以及转速n 为状态变量, 进行一系列计算,这样就可以很方便的观测到磁链圆如图6( a)和估算的速度曲线如图6( b)。在计算过程中, 由于采样噪声、系统噪声、电机参数随温度变化等原因, 造成估算值在一定范围内浮动, 但是基本稳定。
通过EKF完成了异步电机的速度在线辨识, 为以后建立异步电机无速度传感器矢量控制系统奠定了基础。
6 结束语
试验证明, 应用Matlab对DSP进行实时调试和代码生成, 有效地改变了传统的设计方法。用M atlab快速建立T IDSP模型及直接生成C 语言程序的方法, 简化了DSP 软件的开发。在Embeddedtarget for TI C2000 工具箱中还包含其他工具, 如PWM 控制、CAN 总线控制及通用I /O 控制等。利用这些工具与Simu link中的其他工具相结合, 能够完成复杂功能的DSP程序设计, 并且只需要进行少量修改, 就可以实现功能正确的C 语言程序设计,大大提高了程序开发效率。