
引言
电动执行器是工业过程控制系统中一个十分重要的现场驱动装置,其能源取用方便、安装调试简单,在电力、冶金、石油、化工等工业部门得到越来越广泛的应用。电动执行器包括电动执行机构和调节阀两部分,控制精度主要决定于电动执行机构的控制性能,它能够将系统的控制信号转换成输出轴的角位移、直线位移,控制阀门等截流件的位置或其它调节机构,使被控介质按系统要求状态工作。
开关磁阻电机调速系统SRD(Switched Reluctance Drive)是继变频调速系统、无换向器电动机调速系统之后发展起来的最新一代交流无级调速系统。它具有机构简单、坚固、成本低、工作可靠、控制灵活、运行效率高等诸多优点,由其构成的传动系统具有交、直流传动系统所有的优点。基于开关磁阻电机特点,可以将开关磁阻电机调速技术运用在智能电动执行器系统中,这对提高智能电动执行器控制性能至关重要。
一、SRD系统的基本结构
开关磁阻电机调速系统SRD主要有SRM、功率变换器、位置检测、控制器构成。如图1所示。
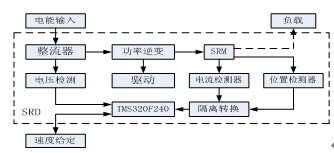
图1.SRD系统结构图
二、SRD系统的硬件设计
1.功率变换器的主电路设计
功率变换器的性能和形式直接影响SRM的效率、成本和可靠性,合理设计功率变换器是提高整个SRD性价比的关键。功率变换器主要有3个作用:一是开关作用,是绕组与电源接通或断开;二是为绕组的储能提供回馈途径;三是为SRM提供电能,满足机械能的转换。常见的SRM功率变换器有3种:一是双绕组功率变换器;二是不对称半桥功率变换器;三是H桥式功率变换器。
本系统采用的是电容分压型主电路,它也叫电容裂相型主电路或双电源型主电路,是四相SRM广泛采用的一种功率变换器电路,其电路结构如图2所示。
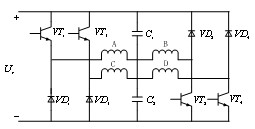
图2 电容分压型主电路
在此电路中,SRM采用单相通电方式,当上桥臂的开关管 导通时,A相绕组从电容 吸收电能;当 断开时,则 导通,A相绕组的剩余能量回馈给电容 。而当下桥臂 导通时,绕组B从 吸收电能:当 断开时,B相绕组的剩余能量经VD2回馈给 。因此,为了保证上、下两个电容的工作电压对称,该电路仅适用于偶数相SRM。由于采用电容分压,加到电机绕组两端的电源电压仅为 ,电源电压的利用率降低。在同等功率情况下,主开关器件的工作电流为双开关型电路中功率器件的两倍.而每个主开关器件和续流二极管的额定工作电压为 ( 是换相引起的瞬时电压)。
2.位置检测的硬件实现
本文电机采用半数检测方案。对于8/6 SR电机而言,在一个转子极距角 内,共有4个步进角,位置检测信号应相应变化4次,当转过一个转子极距角后,位置信号又回到起始位置,如此循环,即可使转子位置与绕组导电的顺序配合起来。图3为光电式位置检测电路及整形电路。
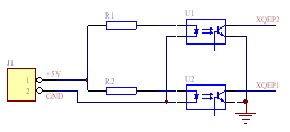
图3 ALVC164245的逻辑结构
四、SRD系统的软件实现
4.1控制算法
本文采用DSP数字PI调节器,实现对电机的双闭环控制,图4为其控制框图。内环为电流环,外环为转速环。计算出的转子实际转速与给定转速进行比较,偏差通过速度控制生成电流参考值。它与电流反馈构成电流闭环,经PI调节来控制PWM的占空比,实现电机速度的控制。
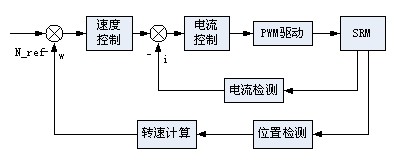
图4 双闭环控制框图
4.2软件结构
本系统中的软件设计采用标准C语言与DSP(TMS320LF2407)汇编语言编程,实行模块化设计,增加了程序的可读性和移植性。本系统程序包括系统的各模块初始化、电流环和位置环中断程序,主要分为主程序和中断程序。
4.2.1主程序
主程序主要完成系统的初始化、初始化状态的显示及起动、运行子程序的调用。图4为主程序的流程图。
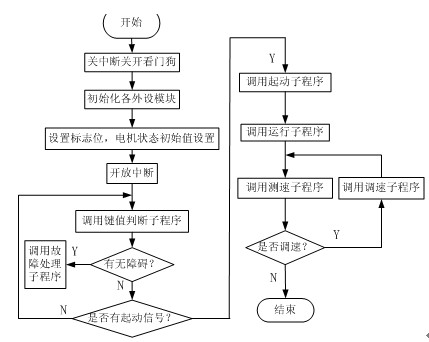
图4. 主程序流程图
4.2.2中断服务子程序
中断服务程序主要包括故障处理子程序、捕获子程序和速度检测。
在系统运行过程中,由于各芯片本身电流、电压的承受能力以及环境的影响,故障的发生是在所难免的。系统出现故障事先读取故障标志,再判断故障类型。若故障为欠压、过压类型,则调用过压、欠压故障处理子程序;若故障为过流、过热时,调用过流、过热故障处理子程序。待故障处理后,中断返回。
捕获子程序主要完成对捕获单元检测的位置信号进行判断及处理并计算电机的转速。位置传感器输出的两路位置信号s1、s2在一个周期内有四种不同的组合,按照不同的组合将一个周期里的两路位置信号划分为四个状态,采用两位二进制编码区分不同的状态,即状态0(00)、状态1(01)、状态2(10)、状态 3(11)。在该程序中处理器读取两个转子位置检测器的输出电平,根据这两个信号的组合就可以决定哪一相应该通电。当捕获输入端发生跳变时,捕获单元会将跳变时刻的定时器的计数值存入到一个两级的FIFO栈,这就方便了计算转子的转速。
双闭环调节程序中采用PI算法,该算法流程图如图6。PI控制的原理是根据给定值 与实际输出值 的偏差 来进行控制的,将偏差的比例和积分通过线性组合构成PI调节器,对受控对象进行控制。其控制规律为: ,式中, 为比例系数, 为积分时间常数。
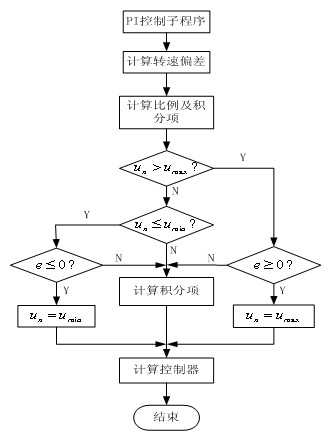
图6 PI控制软件流程图
五、实验结果
采用本文所设计的调速方案,得到的不同转速下电机的电流曲线如下图:
该调速系统采用两相励磁运行。电流曲线图中为A、C相电流曲线(2A/div),其导通顺序为DA-AB-BC-CD,对应转子位置信号为00-01-11-10。由于考虑到电感的影响,在算法中应用PI算法,电流波形的波动很小,起到满意得控制效果。
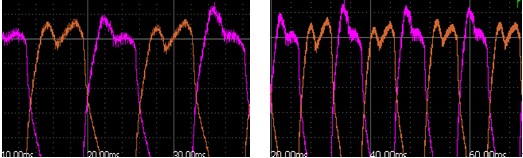
V=800r/m V=1500r/m
六、结束语
本文对基于SRM的智能电动执行器调速系统的控制器部分进行了探讨和研究,完成了对SRM调速系统控制器部分程序的设计工作,实现了位置检测、速度计算、电流斩波以及PWM电压输出等功能。采用本文所述的PI调节控制算法对智能电动执行器进行调速控制,通过大量实验得出的实验曲线表明,该调速系统应用于智能电动执行器上,在转速和电流方面都能很好的跟随给定,有效的减小电流波动,取得良好的控制效果。