
引言
随着国内汽车电子产业的不断升级和研发投入的不断加大,国内生产的汽车电子,如简单的ECU已经越来越普及,应用于车载音响、仪表、车身控制BCM、动力转向EPS等。越来越多的企业将精力投入到比较复杂的控制领域,比如发动机控制,防抱死系统(ABS)等,对于这些逻辑复杂、实时性和安全性高的控制任务,传统的前后台系统模式非实时处理的弊端就越来越呈现出来,这就势必需要用到实时操作系统来管理这些任务。
OSEK标准是1993年德国汽车工业界联合推出的,“汽车电子的开放式系统及接口软件规范”,即OSEK(Open System and the Corres-ponding Interfaces for Automotive Electronics)。1994年法国汽车工业界的相似规范VDX(Vehicle Distributed Executive)和OSEK规范合并,从而形成OSEK/VDX规范体系。当前OSEK标准已经成为汽车电子软件开发领域中的通用标准,旨在增强软件代码安全性、移植性,减少软件开发周期。
目前,市场上通用的开源RTOS有很多,比如μC/OS-Ⅱ,FreeRTOS,Linux-2.6等,但是这些核多半是用于通用领域或者安全性要求不太高的领域,如果将这些移植到汽车电子动力安全控制领域,是不太合适的;而且,这些核本身不是基于OSEK标准,如果引入OSEK标准,无疑加大了内核移植的难度。NEC电子的实时操作系统RX850是一款基于OSEK标准的汽车级专用RTOS,其内核的实时性已经得到第三方的专业测试。它已经被移植到了NEC芯片的集成开发环境PM Plus和Green Hills,客户只需要在IDE(Integrated Develop Environment)中编写脚本文件来配置RTOS即可通过编译,使得客户从底层驱动编写到RTOS任务调度轻松实现“无缝结合”,大大缩短了RTOS移植的开发周期。本文建立了基于NEC电子32位车身专用芯片V850/Fx3的软件平台,并介绍了如何实现RX850操作系统的配置,以发动机控制模块为控制模型来实现多任务的实时调度,最后通过软仿工具来分析该内核的效率和任务调度的实时性。
1 系统平台介绍
本系统采用NEC电子的32位车身专用芯片V850/Fx3系列,V850是NEC电子的32位微处理器核,5级流水线控制,内部32个32位寄存器,乘法/除法指令,数据空间支持最大4 GB线性寻址能力,代码空间支持64 MB线性寻址能力,内部1 MB的codeFLASH,60 KB的RAM空间,32 KB的data FLASH用作E2PROM模拟。
基于OSEK标准的RX850实时操作系统符合以下标准:操作系统规范(OSEKOS)、通信规范(OSEKCOM)、网络管理规范(OSEKNM)和OSEK实现语言(OSEKOIL)。
其中OSEKOS是针对汽车应用特点而专门制定的一个小型RTOS规范,着重以下几个方面:
(1)可移植性,所有API都是标准化的并且在功能上都有明确的定义;
(2)可扩展性,OSEKOS旨在通用于任何类型的ECU,因此一方面系统要高度的模块化,另一方面又要能进行灵活的配置;
(3)汽车应用的特定需求,诸如可靠性、实用性和代价敏感性等。
相应地,OSEKOS静态配置可以通过OS2EKOIL语言实现,用户在系统生成时静态制定任务的个数、需要的资源和系统服务。OSEKCOM为通信网络中的数据交换提供了标准的接口和协议。OSEKNM为监视网络的流量提供了一组标准的功能函数,以保证网络的安全性和可靠性。
2 RX850内核配置
由于RX850已经被嵌入到IDE,因此用户直接编写内核脚本文件即可,下面介绍如何来配置内核。
(1)系统时钟设置
clkhdr INTTMOEQ0 //选定TimerM为时间片中断源
(2)堆栈设置
RX850的堆栈分为系统堆栈和任务堆栈。
POOL0功能:系统基本表信息、准备队列、每个管理块、任务堆栈、中断句柄堆栈(系统堆栈)、可变长度内存、不变长度内存。
POOL1功能:任务堆栈、中断句柄堆栈(系统堆栈)、可变长度内存、不变长度内存。
POOL0和POOL1都可以作为任务堆栈,即使没有POOL1也可以。配置如下:
(7)中断设置
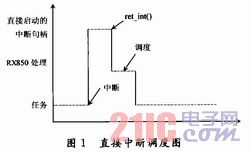
RX850的中断分为直接中断和间接中断两种,直接中断是不受RX850制约的中断句柄,理论上接近硬件中断的速度,其缺点是需要用户自己写中断处理句柄,包括:寄存器压栈;换向,跳转到中断句柄的开始;调用系统命令;返回到调度。间接中断的中断句柄在RX850的中断预处理后才被启动,优点是简化了句柄处理过程,缺点是由于RX850的预处理降低了速度,其处理过程如图1所示。
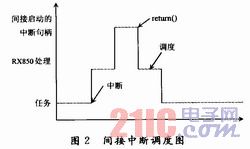
间接中断调度如图2所示,配置如下:
(8)固定/可变内存池设置
当系统需要交换较大的数据时,此时任务堆栈是不够用的,需要开辟一段内存来使用。RX850支持两种方式的内存配置:固定内存池和可变内存池。固定内存池由用户自定义内存池的大小,可变内存池根据实际应用系统动态地定义所需内存大小,配置如下:
(9)系统周期循环中断设置
系统周期循环中断设置如下:![]()
以上完成了操作系统的配置,然后通过NEC的IDE即可生成操作系统的.s和.h文件,将此两个文件包含在工程文件中即可。
3 RX850软仿及结论
通过以上配置,选择发动机控制模块为对象,下面对RX850进行软仿。NEC电子提供专门的软仿工具AZ,在IDE中打开AZ,运行程序后可以看到如图3,图4所示的界面。

也可以通过RD850来实时检测各任务的状态,如图5所示。
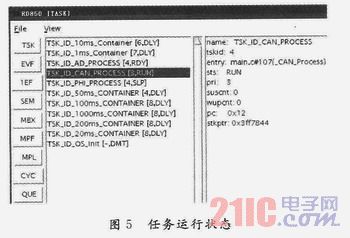
通过图4,图5可以很方便地看到每个任务的实时调度情况和CPU内核的使用效率。目前CPU的空闲率为94%,很多任务实际上没有被调用,用户可以根据实际情况将更多的功能模块放在API任务中来运行。软仿只能提供模拟的仿真,如果用户需要更精确的trace工具,则需要用硬仿来实现。
4 结语
对于比较复杂的控制系统,RTOS是必不可少的,建立以上开发平台,使得系统工程师可以专注于系统功能建模仿真,然后将功能函数与该平台的API任务调度结合,即可完成片上测试。实践证明,这种开发模式大大提高了整个项目的进度。